GO_to_MIT が 2021年01月10日23時57分10秒 に編集
初版
タイトルの変更
初心者向け無限関節うねうねロボットの作り方!
タグの変更
ロボット
ロボットアーム
電子工作
初心者向け
ダンボット
うねうねロボット
DIY
秋葉原2021
メイン画像の変更
記事種類の変更
製作品
本文の変更
無限関節ロボットの作り方 = 今回作るロボットの完成動画です! [https://youtu.be/ZrSWii_Enao](https://youtu.be/ZrSWii_Enao) はじめまして = 高校2年のサニーです。趣味はサイクリングと音楽制作です。電子工作は殆ど触れたことがなく、未だにLチカは成功していませんw。 この間、[米BostonDynamicsのロボットにダンスを踊らせる動画](https://www.youtube.com/watch?v=fn3KWM1kuAw&t=4s)をみて、全身がブルブルブルブル震え、運命を感じました。途端にロボットが作りたくなって、電子工作に必要なものとGoogleで検索したら、テスターは必須だと書いてあったので自転車で急いでホームセンターに行き、テスターと精密ドライバーを買ってきました。未だにテスターは使っていないので、この記事で作るロボットにはテスターはいりません。精密ドライバーは165円で買えました。安いですね。では作っていきましょう♡ 必要なもの = ・ダンボット(いらない人はいらない) (http://www.robotsfx.com/robot/Danbot.html) ・つるまきバネ ・ベニヤ板 ・ネジ ・瞬間接着剤 ・精密ドライバー ・のこぎり ・電動ドリル ・台座(私は百均でフィギア用ディスプレイケースを買いました) ・細い紐 実は、3年前のクリスマスプレゼントにサンタさんからダンボットをもらっていましたw。もらったときは全くはまらず、すぐに棚にしまわれましたが、ついに出番が来ました。 ダンボットは PC不要。 テレビリモコンでプログラムと操縦ができる入門ロボキット ですから最強です。電子工作の脱落者が多いプログラムをテレビリモコンでできるなんて最高です。なくてもこの記事でロボットアームを作ることはできますが、制御の部分で難易度が上がります。 注意事項があります。この手順に従ってこのロボットを制作した場合、もと2足歩行可能なダンボットには戻せなくなります。ご注意ください。 STEP1 = まずは買い出しです。 つるまきバネは、縦に持ったときに自立するものを購入してください。つるまきバネの長さが完成するアームの長さになります。下の画像をご覧ください。  画像の中心を通っているのが”つるまきバネ”です。私は20cmほどのものをホームセンターで買いました。結構高くて、600円ぐらいしました。たぶんつるまきバネではなく、ふつうのバネでも大丈夫です。 次に精密ドライバーを買います。ダンボットについているネジに合ったものを購入してください。200円ぐらいです。 次はベニヤ板です。これは先程の画像のバネの周りにある正方形のパーツを作る際に使います。別にベニヤ板でなくても何でもいいです。 次は台座です。台座は上につくアームを支えるためのものなので、アームの長さ(つるまきバネの長さ)にあわせたものを購入してください。私の場合は、中のサーボの動きが見えるようにしたかったので、100円ショップで透明なディスプレイ用ケースを購入しました。ただ、このディスプレイケースは2面しかないものだったのであとあと、サーボの取り付け位置が制限されてしまいました。 また台座は、後々サーボを4個つけるため、ある程度大きいものを選択してください。 次は瞬間接着剤を買ってください。これがあるだけで1000倍楽です。 STEP2 = では作っていきましょう! 一日で完成します♡ まずは土台の上面の中心に、つるまきバネが刺さるサイズの穴を開けてください。 次に、ベニヤ板からお好きなサイズ(4×4程度)の正方形を切り出します。 数は弦巻羽の長さにもよりますが、3cm間隔程度で配置したいので、8個ほど切り出してください。  そしたら上の画像のように、正方形の中心につるまきバネが通る大きさの穴を開けてください。 次に、上の画像にあるように、紐が通るサイズの穴を4つ開けてください。 つまりこのロボットアームは紐で正方形を通してバネを引っ張ることで腕が曲がります。 上の画像にあるように4つの穴だけ開けた場合は、アームの途中に関節はできません。その場合は、サーボが2個で作ることができます! 私はアームの途中で曲げたかった(途中に関節を入れたかった)ので、更にアームの下部に配置される正方形には4個の穴を開けました。 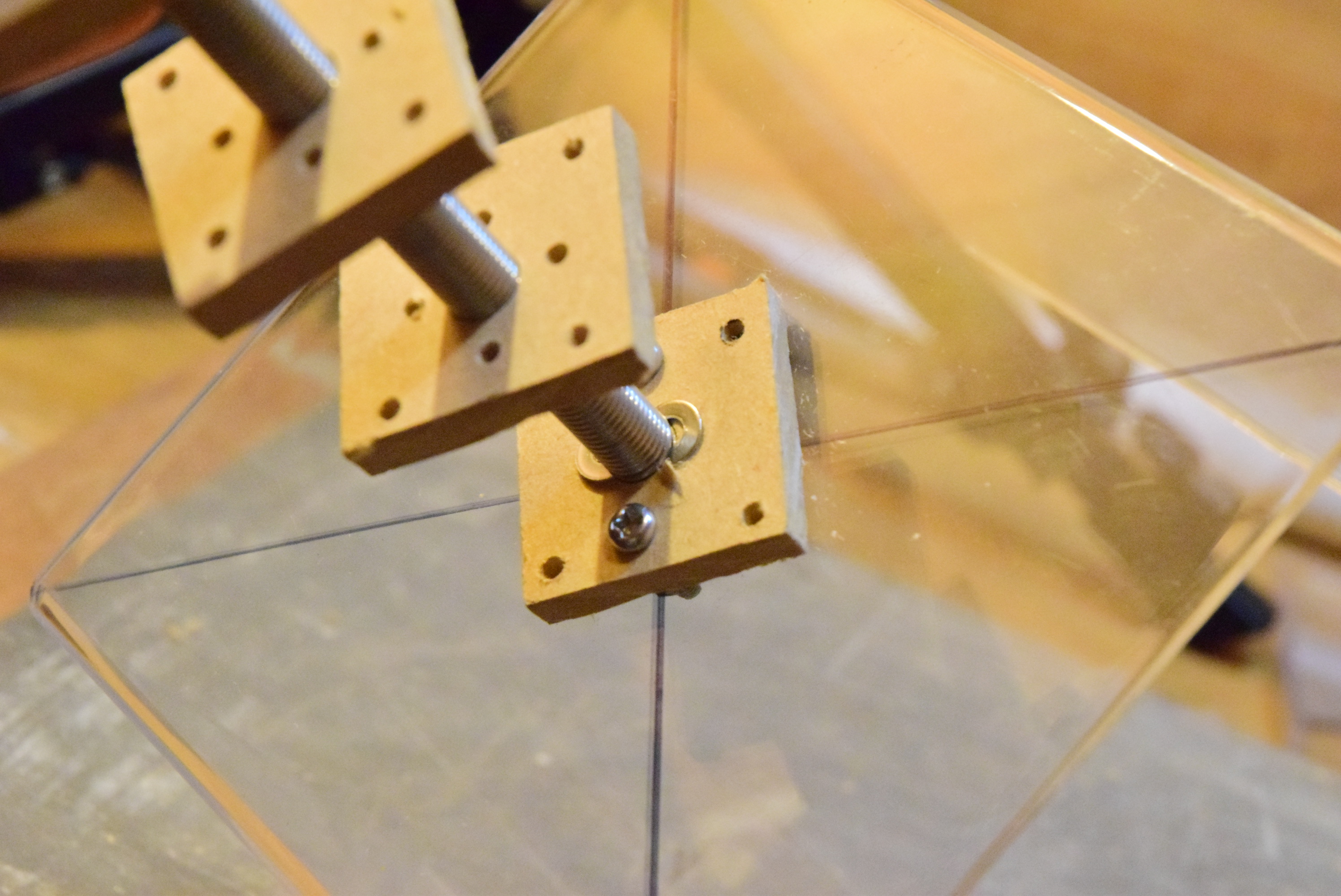 この穴を通る紐は上部の関節を曲げる働きをします。なので、アームの下部の働きには干渉しないように、なるべく中心に近い場所に開けます。 今開けた8つの穴に、あとで紐が通ります。 アームの上部を動かす紐が通る穴はアームの下部のみ開けたので、下の画像ようになります。 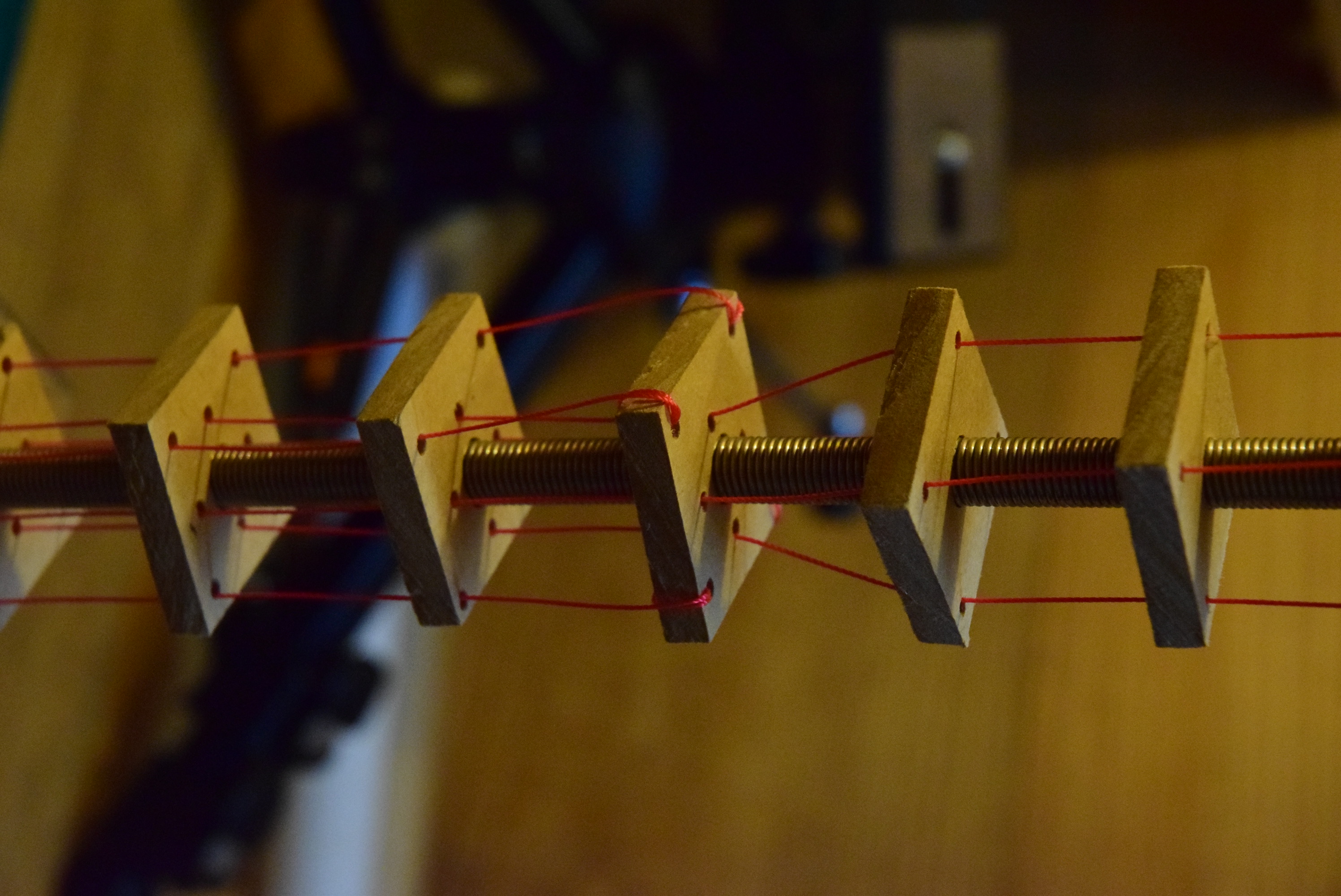 ではバネに正方形をさしてみましょう。 次にバネを台座にさしましょう。 ただ、このままだとバネがだんだんずれて下がってしまいます。なのでワッシャーを差し込み、うまく止めてください。下の画像 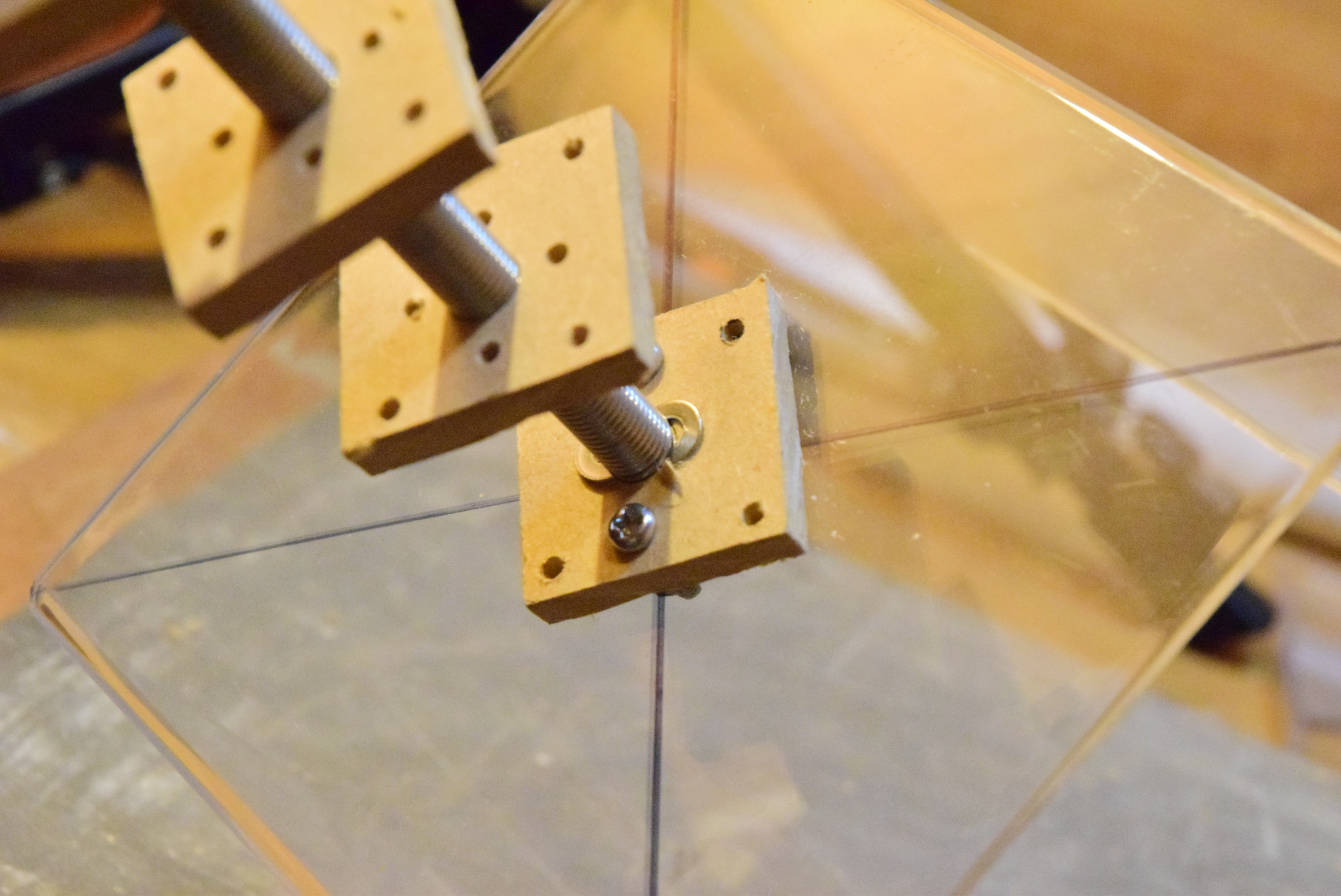 次に、上の画像のように最下部の正方形の板を台座にネジ止めしてください。 STEP3 = 次は紐を通していきます。家にあった細い紐を通しました。 下部を動かすようの紐は、下部の一番上の板で結んでください。 上部を動かす用の下部ではバネの近くを通していた紐はアームの最上部の板で結んでください。 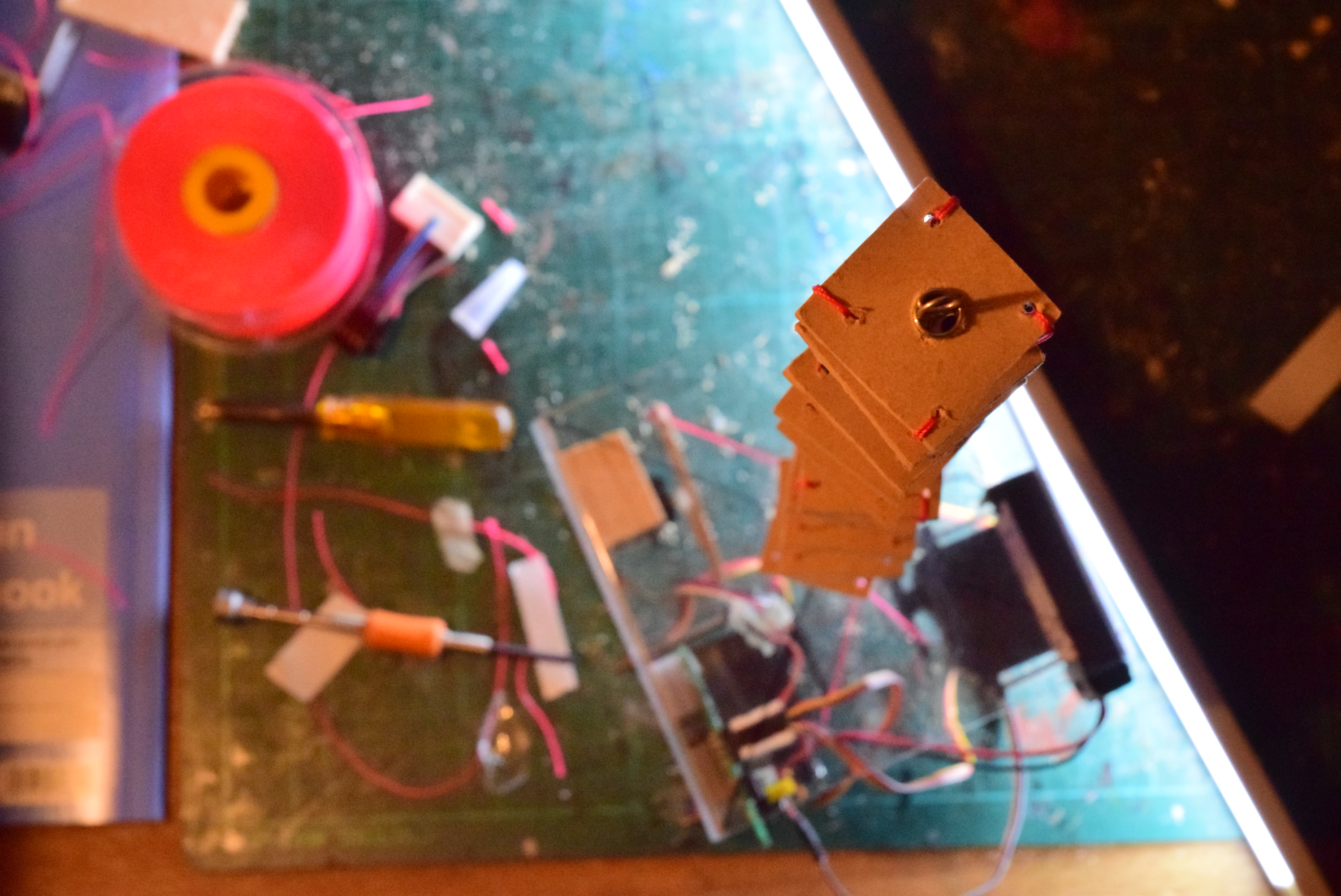 紐を手で引いて動かしてみてください! STEP4 = 紐を引っ張る部分を作っていきます。 適当なサイズのサーボホーンを作ります。 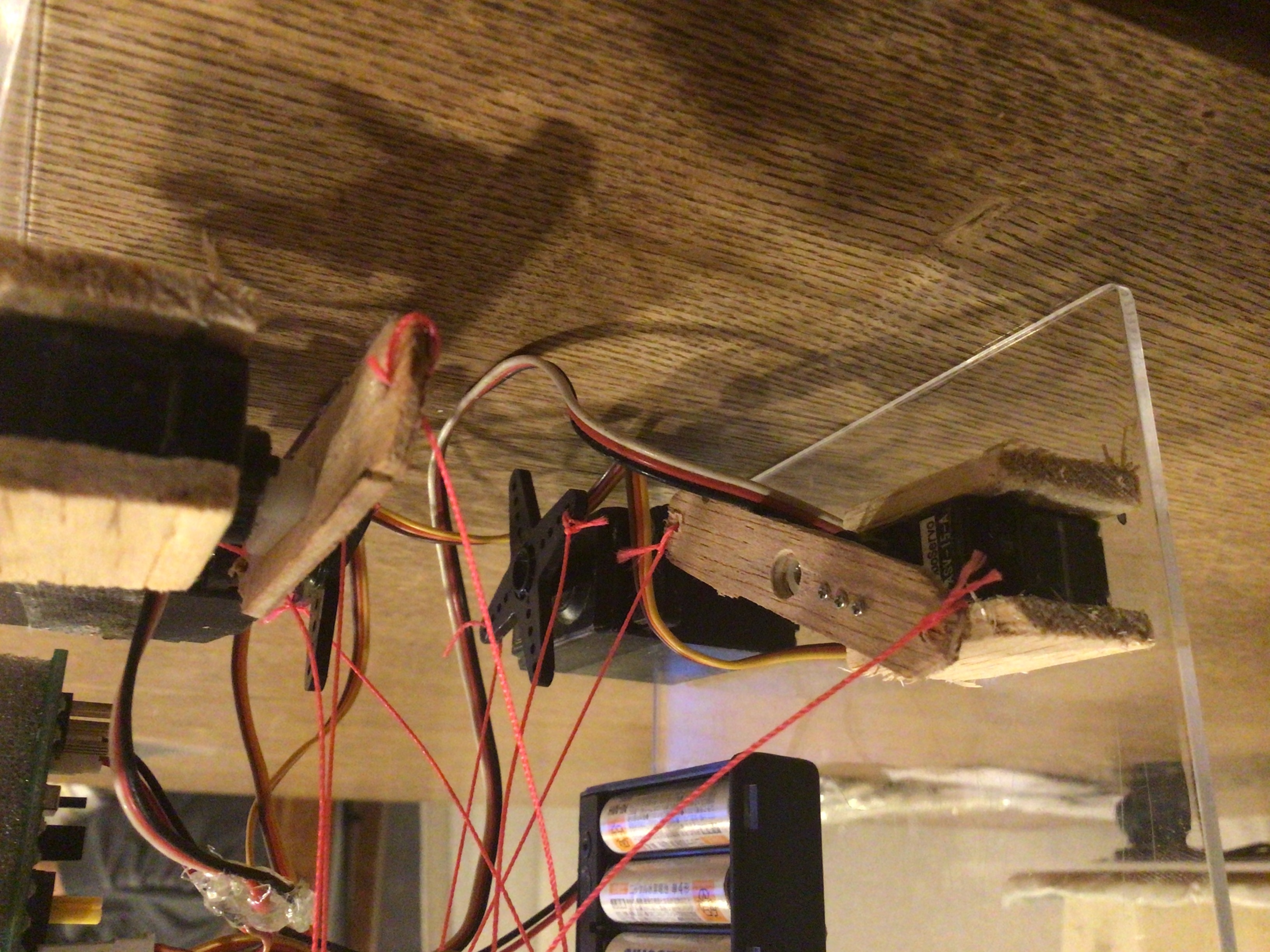 紐が十分に引けるサイズであれば問題ありません。 私はダンボットの足を料理しましたw。 上の画像では、前2つのサーボがダンボットのものと違いますが、ダンボット用のサーボで全く問題ありません。 **まだ、サーボホーンに紐は結ばないでください。** STEP5 = サーボを台座に固定します。 紐を引いてみて、他のサーボの引く紐と干渉しない位置にとりつけてください。 私は、瞬間接着剤でべちょって止めましたよ 楽ちんですね。 ==まだ、紐は結ばないでください== 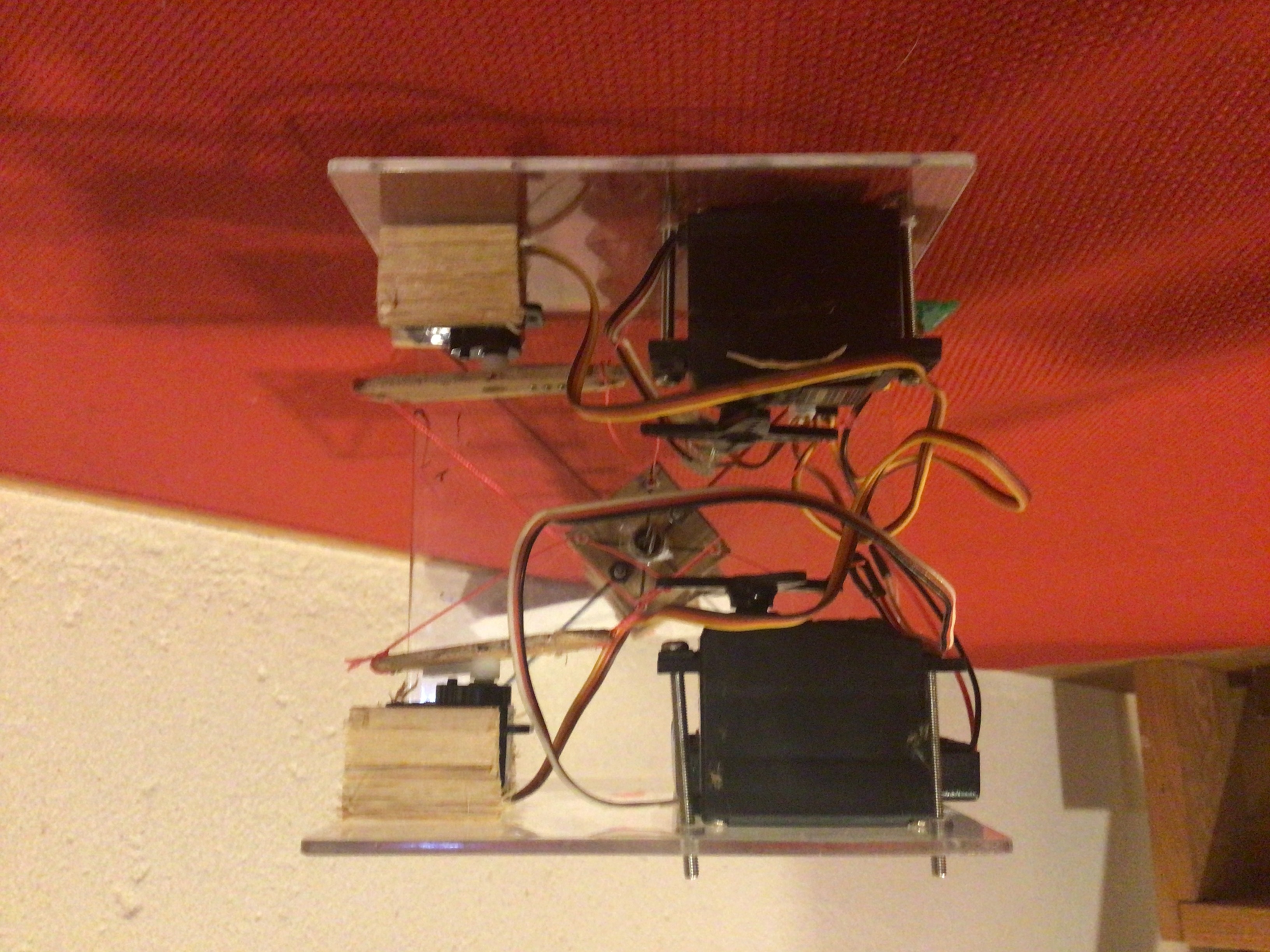 STEP6 = サーボとダンボットの基盤をつないで電気をながしてください。 こうすることで、サーボの初期位置がわかります。 ダンボットを使っていない方も電気を流して、サーボの初期位置をしらべてください。 サーボの初期位置が調べられたら、紐を対応するサーボホーンに縛っていきましょう! 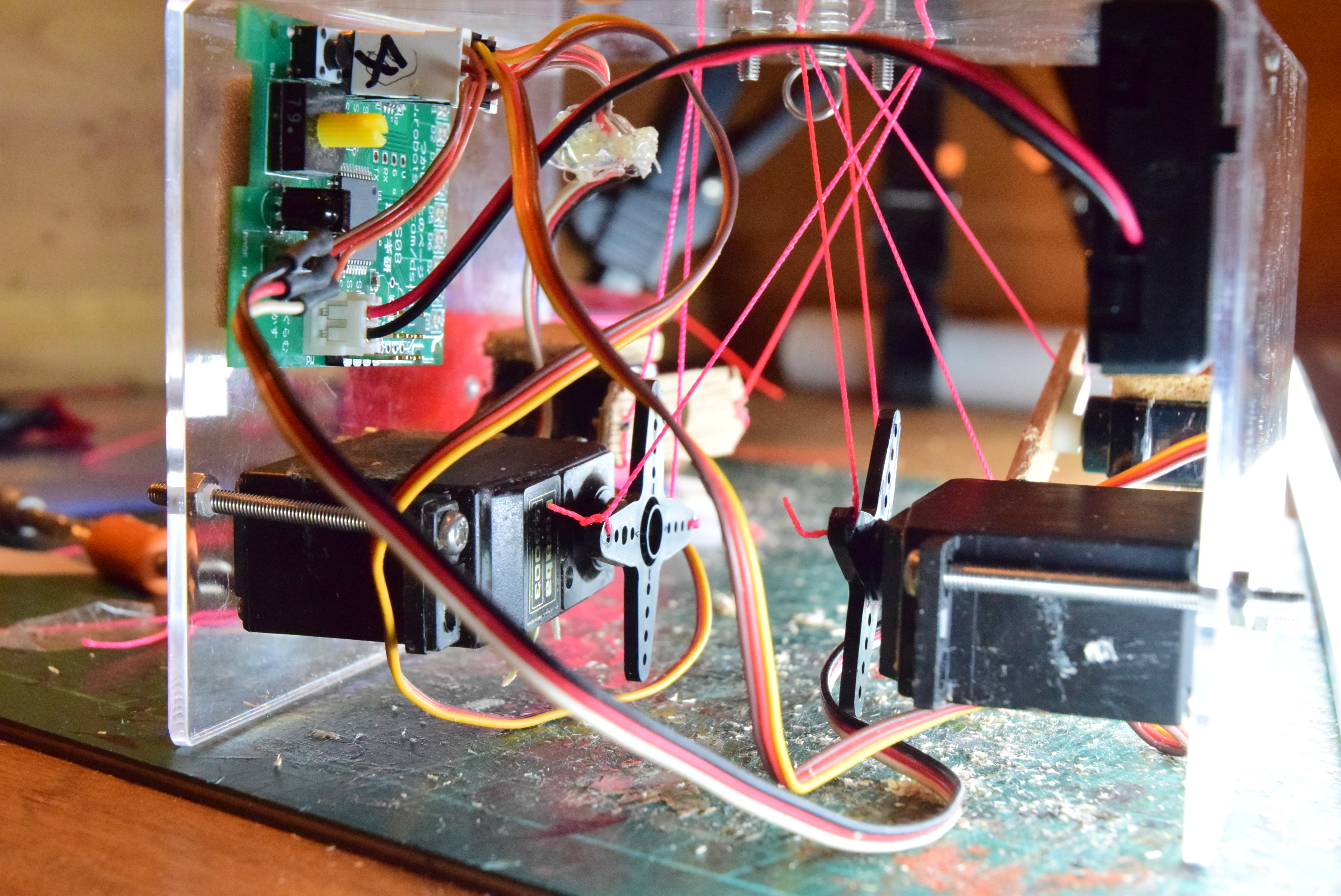 最後に、台座に電池ボックスと基盤を瞬間接着剤でべちょってつけたら完成です。_ 。 おめでとうございます! 完成 = テレビリモコンを使って動かしてみましょう! 完成動画 https://youtu.be/ZrSWii_Enao 感銘を受けたBoston Dynamicsのパロディ動画にしました 元の動画 [https://www.youtube.com/watch?v=fn3KWM1kuAw&t=4s](https://www.youtube.com/watch?v=fn3KWM1kuAw&t=4s)  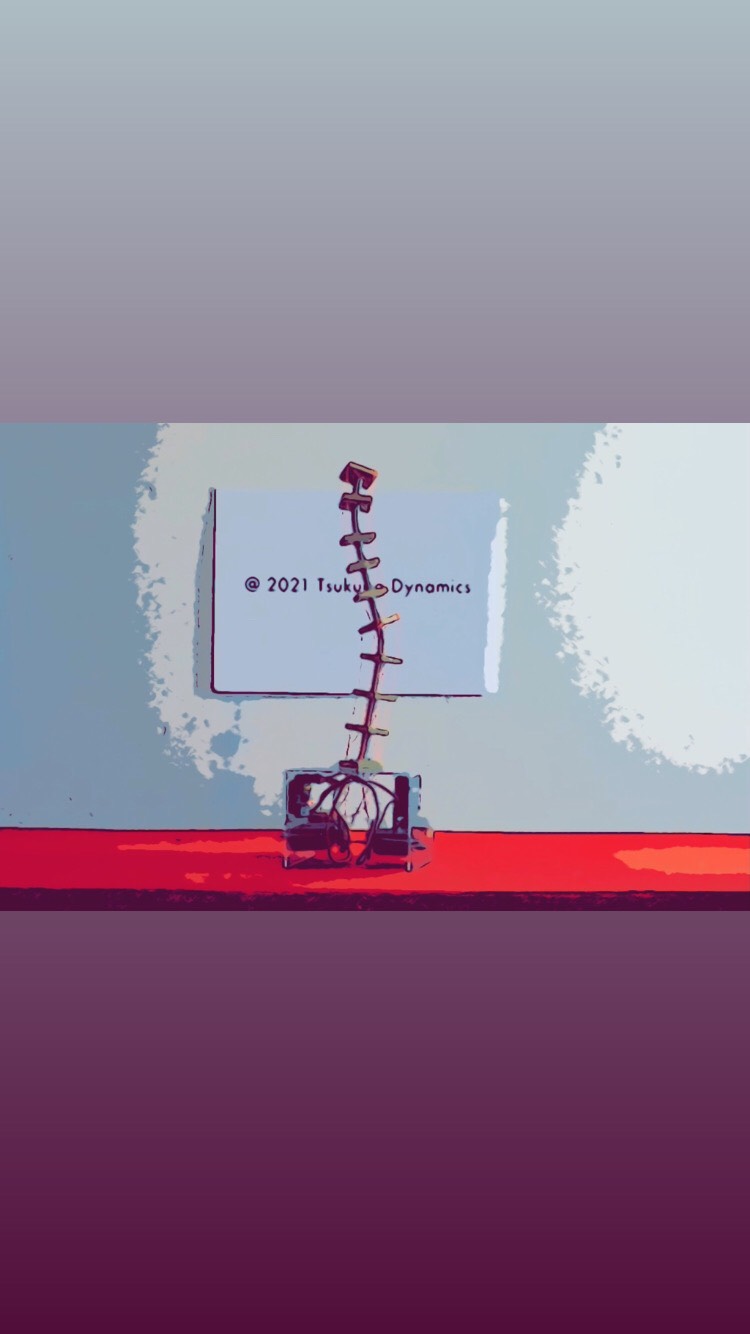 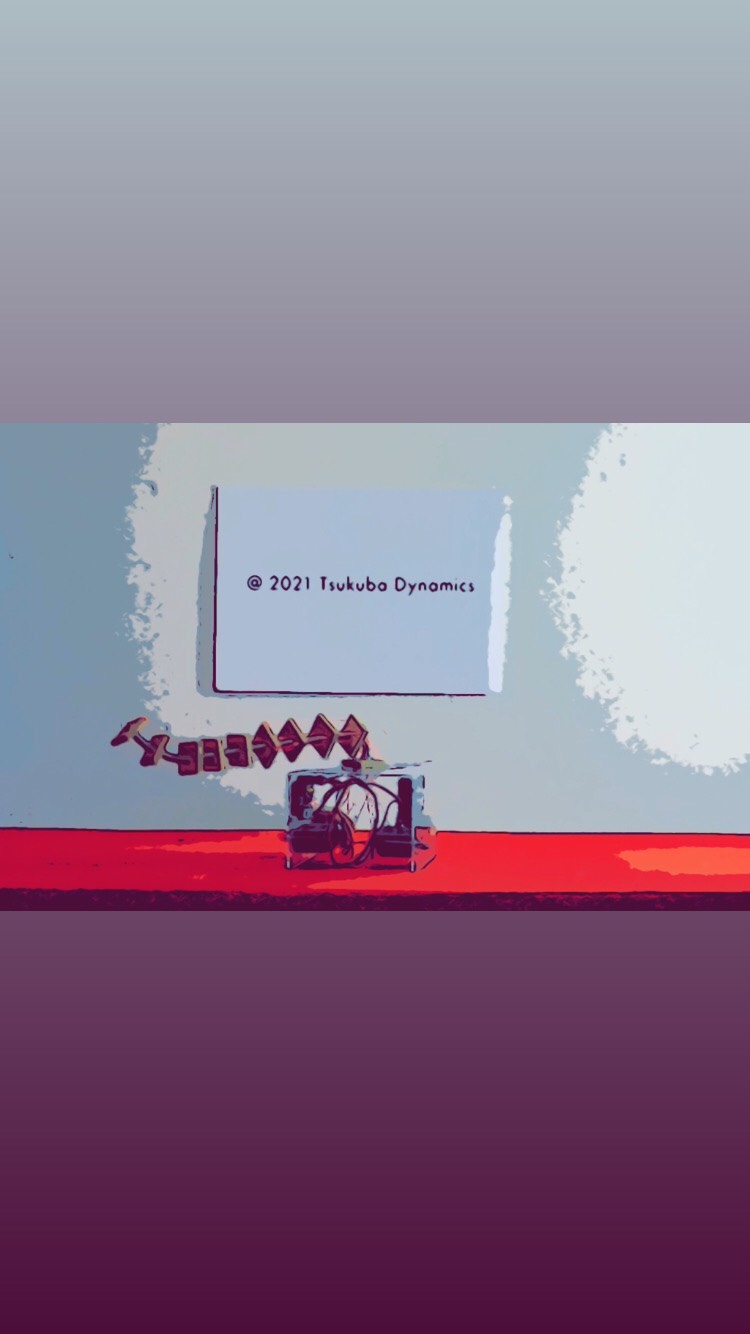 結構複雑な動きができますよ 使い道を考えてみてください。 読んでいただきありがとうございました。 elchikaハードウェア作品投稿キャンペーンで投稿させていただきました! ありがとうございました!