nakkyi が 2022年09月22日22時06分36秒 に編集
コメント無し
本文の変更
## <はじめに> ・M5Stick Cを使って、二足歩行ロボットを作る計画をしました。 ・M5Stick Cには、GPIOが4個しかないので4個を足の軸にしました。 ・M5Stick Cは頭にして、顔を作りました。 ・最初は、形作りから始めて次にモーションを作りました。 ## <用意する物> |部品名|型式|メーカー|数量| |---|---|---|---| |マイコン|M5stick C|M5STACK|1| |サーボモーター|RS303MR|Futaba|4| |バッテリー|リポ7.4V450mA|ROBIN|1| |コネクター基板|ユニバーサル基板|自作|1| |ボディー|アルミ切削|自作|1| |ブラケット|アルミニウム|Futaba|4| |足裏|ユニバーサル基板|自作|2| * ほとんどの部品は、ロボット作りをした時の在庫の部品です。 ## <製作方法> 1.上記の部品を集めて、形作りからです。 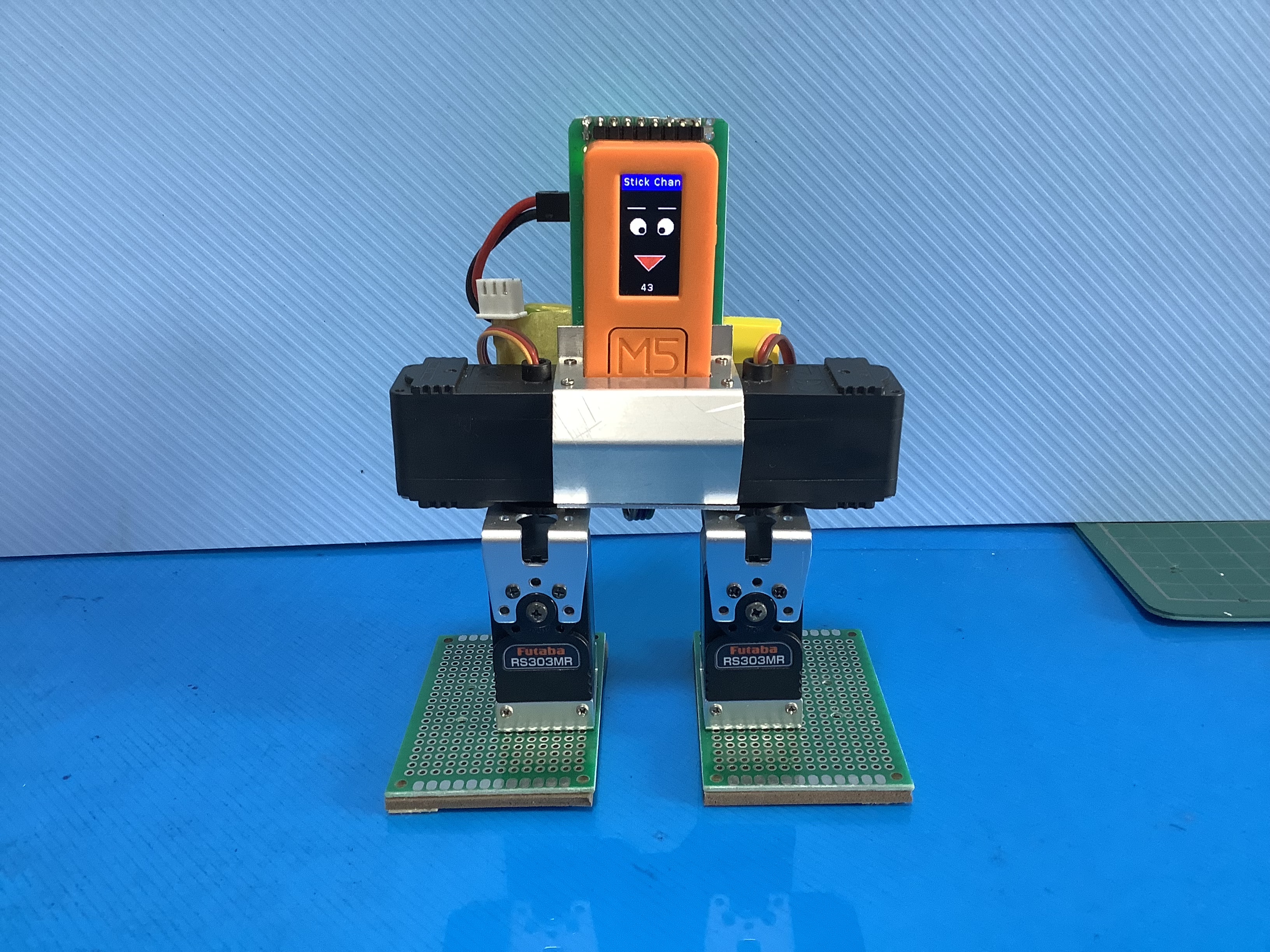 2.ボディーのアルミ部品は、CADで設計をして、CNCで切削加工をしました。 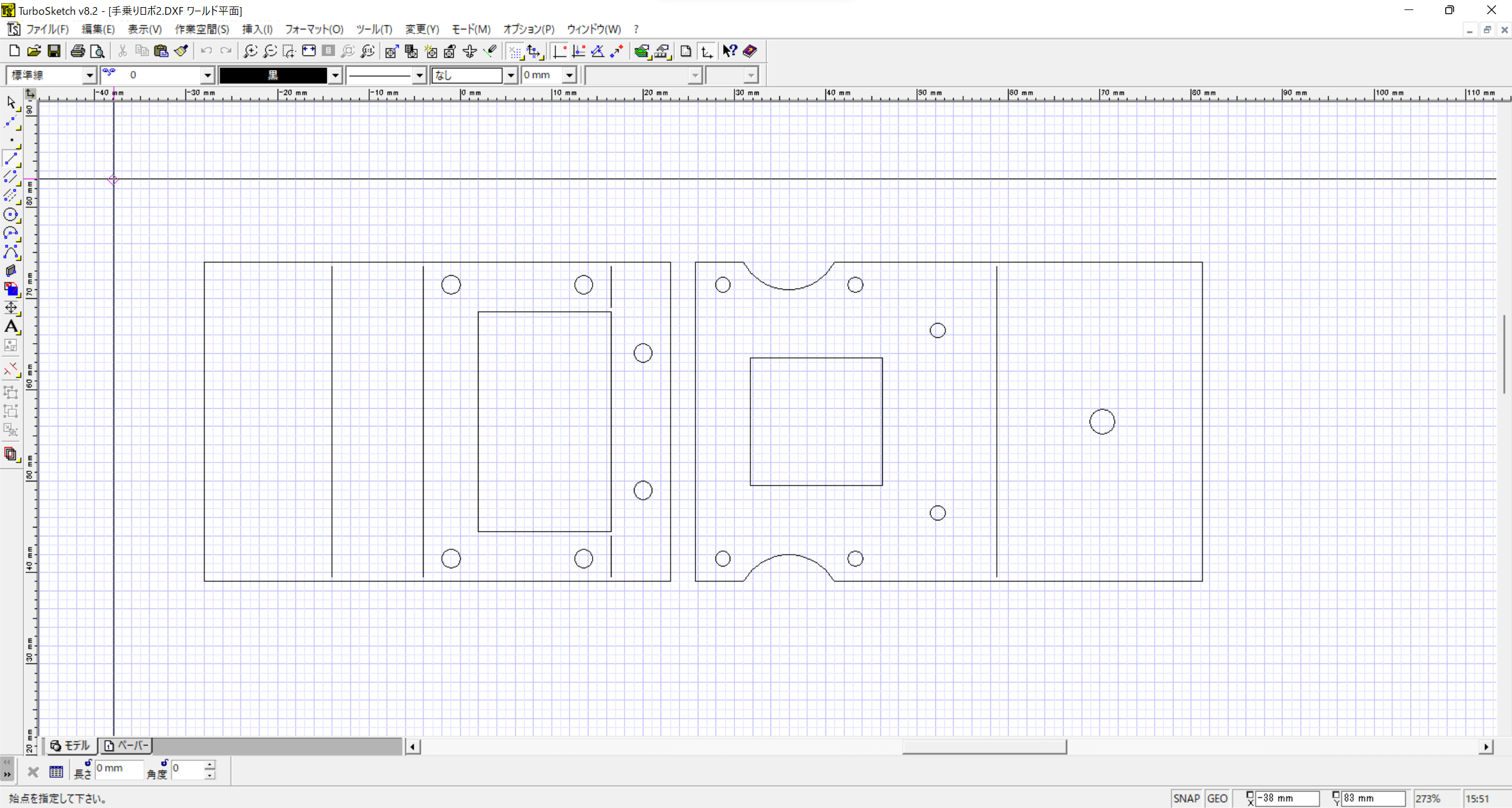 3.サーボモーターが6V用なので、背中にリポバッテリーを積むことにしました。 4.コネクター基板は、M5Stick CのGPIO4個と、サーボ電弁用のコネクターを取り付けました。また、電源の確認用にLEDを付けました。 ## <プログラム> 前進のモーションをUIFurowで作りました。 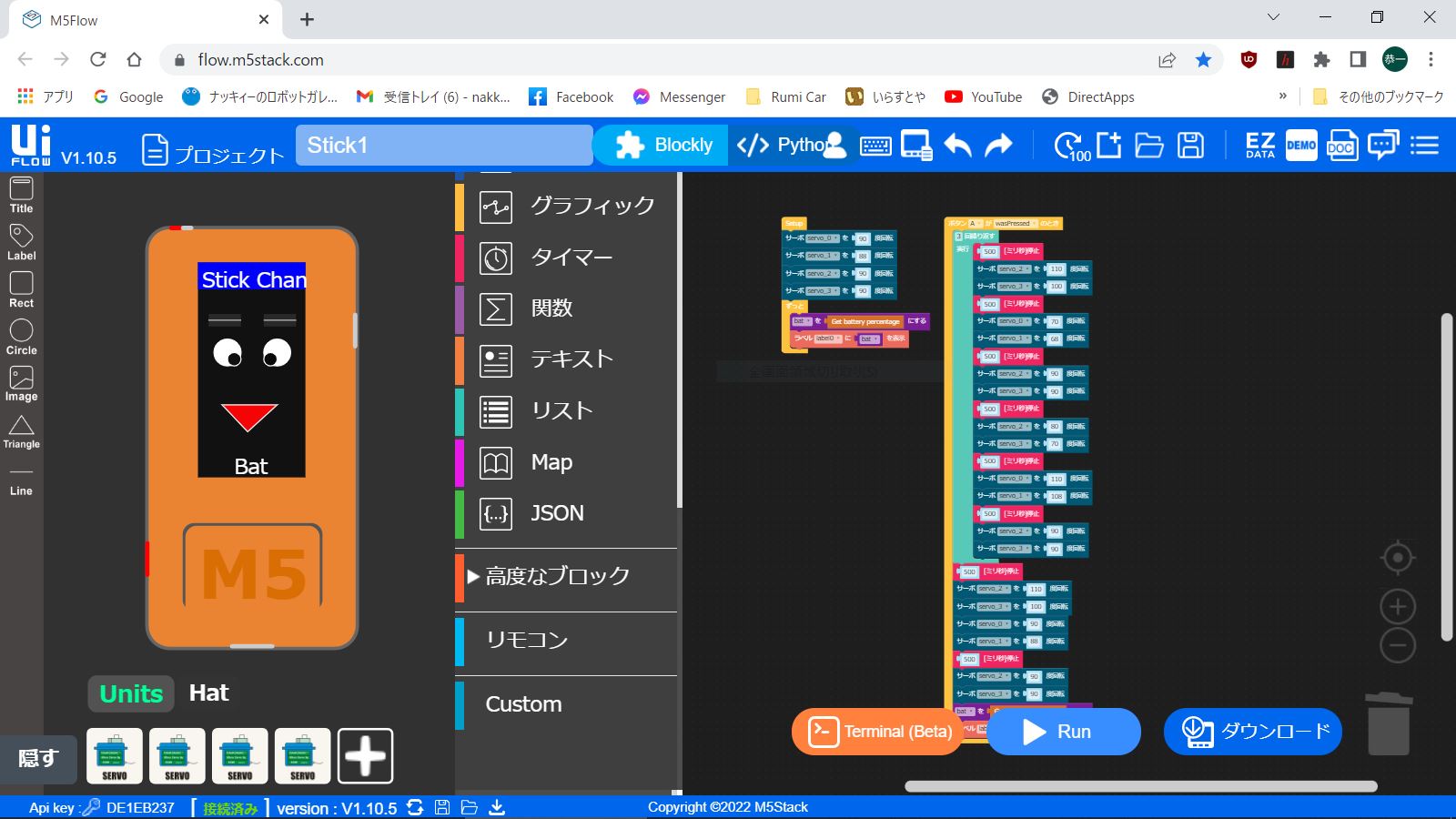 ## <前進の動画>
@[youtube](https://youtu.be/oTjdcZfqpOc)
@[youtube](https://youtu.be/ce3ji357qvI)
## <回路図> 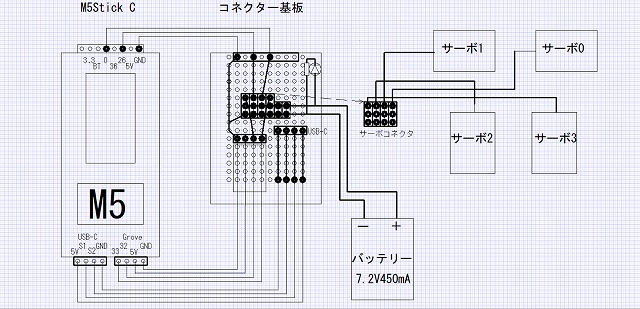 ## <まとめ> M5Stick Cを使って、二足歩行ロボットを作ることが出来ました。4個のGPIOを使って、歩くだけのロボットに成ってしまいましたが、もっと動き回れるモーションを作りたいと思います。