c_kanata が 2024年01月30日15時07分33秒 に編集
初版
タイトルの変更
GNSSを用いたスクールバスの運行状況の確認
タグの変更
Arduino
SPRESENSE
GNSS
メイン画像の変更
記事種類の変更
製作品
本文の変更
**制作経緯** - バスの運行状況を知ることができれば混雑していてもどこにバスが居るのか知ることができるので移動時間などの計画が立てやすくなると思ったので制作しました。 **使用部品** - SPRESENSE™ メインボード SPRESENSE™ 拡張ボード ELTRES Add-onボード microSDカード 電源供給用モバイルバッテリー **設計図** - 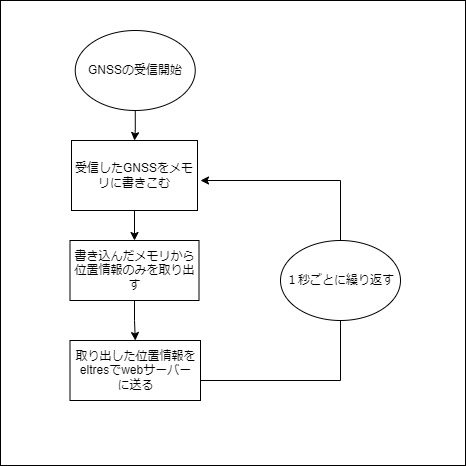 ++制作途中です++ **ソースコード** - Arduino内のスケッチ例の中にあるサンプルコード**gnss_tracker** をベースに作成する。 ``` #include <GNSS.h> #include <GNSSPositionData.h> #include "gnss_tracker.h" #include "gnss_nmea.h" #include "gnss_file.h" /* Config file */ #define CONFIG_FILE_NAME "tracker.ini" /**< Config file name */ #define CONFIG_FILE_SIZE 4096 /**< Config file size */ /* Index file */ #define INDEX_FILE_NAME "index.ini" /**< Index file name */ #define INDEX_FILE_SIZE 16 /**< Index file size */ #define STRING_BUFFER_SIZE 128 /**< %String buffer size */ #define NMEA_BUFFER_SIZE 128 /**< NMEA buffer size */ #define OUTPUT_FILENAME_LEN 16 /**< Output file name length */ /* Default parameter. */ #define DEFAULT_INTERVAL_SEC 1 /**< Default positioning interval in seconds*/ #define DEFAULT_ACTIVE_SEC 60 /**< Default positioning active in seconds */ #define DEFAULT_SLEEP_SEC 0 /**< Default positioning sleep in seconds */ #define INITIAL_ACTIVE_TIME 300 /**< Initial positioning active in seconds */ #define IDLE_ACTIVE_TIME 600 /**< Idle positioning active in seconds */ #define SERIAL_BAUDRATE 115200 /**< Serial baud rate */ #define SEPARATOR 0x0A /**< Separator */ /** * @enum LoopState * @brief State of loop */ enum LoopState { eStateSleep, /**< Loop is not activated */ eStateActive /**< Loop is activated */ }; /** * @enum TrackerMode * @brief Tracker mode */ enum TrackerMode { eModeNormal = 0, /**< Run positioning. Output NMEA text. */ eModeShell /**< Run nsh to print and delete NMEA text. */ }; /** * @enum ParamSat * @brief Satellite system */ enum ParamSat { eSatGps, /**< GPS */ eSatGlonass, /**< GLONASS */ eSatGpsSbas, /**< GPS+SBAS */ eSatGpsGlonass, /**< GPS+Glonass */ eSatGpsQz1c, /**< GPS+QZSS_L1CA */ eSatGpsBeidou, /**< GPS+BeiDou */ eSatGpsGalileo, /**< GPS+Galileo */ eSatGpsGlonassQz1c, /**< GPS+Glonass+QZSS_L1CA */ eSatGpsBeidouQz1c, /**< GPS+BeiDou+QZSS_L1CA */ eSatGpsGalileoQz1c, /**< GPS+Galileo+QZSS_L1CA */ eSatGpsQz1cQz1S, /**< GPS+QZSS_L1CA+QZSS_L1S */ }; /** * @struct ConfigParam * @brief Configuration parameters */ typedef struct { ParamSat SatelliteSystem; /**< Satellite system(GPS/GLONASS/ALL). */ boolean NmeaOutUart; /**< Output NMEA message to UART(TRUE/FALSE). */ boolean NmeaOutFile; /**< Output NMEA message to file(TRUE/FALSE). */ boolean BinaryOut; /**< Output binary data to file(TRUE/FALSE). */ unsigned long IntervalSec; /**< Positioning interval sec(1-300). */ unsigned long ActiveSec; /**< Positioning active sec(60-300). */ unsigned long SleepSec; /**< Positioning sleep sec(0-240). */ SpPrintLevel UartDebugMessage; /**< Uart debug message(NONE/ERROR/WARNING/INFO). */ } ConfigParam; SpGnss Gnss; /**< SpGnss object */ ConfigParam Parameter; /**< Configuration parameters */ unsigned int Mode; /**< Tracker mode */ char FilenameTxt[OUTPUT_FILENAME_LEN]; /**< Output file name */ char FilenameBin[OUTPUT_FILENAME_LEN]; /**< Output binary file name */ AppPrintLevel AppDebugPrintLevel; /**< Print level */ unsigned long SetActiveSec; /**< Positioning active sec(60-300) */ /** * @brief Compare parameter. * * @param [in] Input Parameter to compare * @param [in] Refer Reference parameter * @return 0 if equal */ static int ParamCompare(const char *Input , const char *Refer) { /* Set argument. */ String InputStr = Input; String ReferStr = Refer; /* Convert to upper case. */ InputStr.toUpperCase(); ReferStr.toUpperCase(); /* Compare. */ return memcmp(InputStr.c_str(), ReferStr.c_str(), strlen(ReferStr.c_str())); } /** * @brief Turn on / off the LED0 for CPU active notification. */ static void Led_isActive(void) { static int state = 1; if (state == 1) { ledOn(PIN_LED0); state = 0; } else { ledOff(PIN_LED0); state = 1; } } /** * @brief Turn on / off the LED1 for positioning state notification. * * @param [in] state Positioning state */ static void Led_isPosfix(bool state) { if (state == 1) { ledOn(PIN_LED1); } else { ledOff(PIN_LED1); } } /** * @brief Turn on / off the LED2 for file SD access notification. * * @param [in] state SD access state */ static void Led_isSdAccess(bool state) { if (state == 1) { ledOn(PIN_LED2); } else { ledOff(PIN_LED2); } } /** * @brief Turn on / off the LED3 for error notification. * * @param [in] state Error state */ static void Led_isError(bool state) { if (state == 1) { ledOn(PIN_LED3); } else { ledOff(PIN_LED3); } } /** * @brief Convert configuration parameters to String * * @param [in] pConfigParam Configuration parameters * @return Configuration parameters as String */ static String MakeParameterString(ConfigParam *pConfigParam) { const char *pComment; const char *pParam; const char *pData; char StringBuffer[STRING_BUFFER_SIZE]; String ParamString; /* Set SatelliteSystem. */ pComment = "; Satellite system(GPS/GLONASS/SBAS/QZSS_L1CA/QZSS_L1S)"; pParam = "SatelliteSystem="; switch (pConfigParam->SatelliteSystem) { case eSatGps: pData = "GPS"; break; case eSatGpsSbas: pData = "GPS+SBAS"; break; case eSatGlonass: pData = "GLONASS"; break; case eSatGpsGlonass: pData = "GPS+GLONASS"; break; case eSatGpsBeidou: pData = "GPS+BEIDOU"; break; case eSatGpsGalileo: pData = "GPS+GALILEO"; break; case eSatGpsQz1c: pData = "GPS+QZSS_L1CA"; break; case eSatGpsQz1cQz1S: pData = "GPS+QZSS_L1CA+QZSS_L1S"; break; case eSatGpsBeidouQz1c: pData = "GPS+BEIDOU+QZSS_L1CA"; break; case eSatGpsGalileoQz1c: pData = "GPS+GALILEO+QZSS_L1CA"; break; case eSatGpsGlonassQz1c: default: pData = "GPS+GLONASS+QZSS_L1CA"; break; } snprintf(StringBuffer, STRING_BUFFER_SIZE, "%s\n%s%s\n", pComment, pParam, pData); ParamString += StringBuffer; /* Set NmeaOutUart. */ pComment = "; Output NMEA message to UART(TRUE/FALSE)"; pParam = "NmeaOutUart="; if (pConfigParam->NmeaOutUart == FALSE) { pData = "FALSE"; } else { pData = "TRUE"; } snprintf(StringBuffer, STRING_BUFFER_SIZE, "%s\n%s%s\n", pComment, pParam, pData); ParamString += StringBuffer; /* Set NmeaOutFile. */ pComment = "; Output NMEA message to file(TRUE/FALSE)"; pParam = "NmeaOutFile="; if (pConfigParam->NmeaOutFile == FALSE) { pData = "FALSE"; } else { pData = "TRUE"; } snprintf(StringBuffer, STRING_BUFFER_SIZE, "%s\n%s%s\n", pComment, pParam, pData); ParamString += StringBuffer; /* Set BinaryOut. */ pComment = "; Output binary data to file(TRUE/FALSE)"; pParam = "BinaryOut="; if (pConfigParam->BinaryOut == FALSE) { pData = "FALSE"; } else { pData = "TRUE"; } snprintf(StringBuffer, STRING_BUFFER_SIZE, "%s\n%s%s\n", pComment, pParam, pData); ParamString += StringBuffer; /* Set IntervalSec. */ pComment = "; Positioning interval sec(1-300)"; pParam = "IntervalSec="; snprintf(StringBuffer, STRING_BUFFER_SIZE, "%s\n%s%ld\n", pComment, pParam, pConfigParam->IntervalSec); ParamString += StringBuffer; /* Set ActiveSec. */ pComment = "; Positioning active sec(60-300)"; pParam = "ActiveSec="; snprintf(StringBuffer, STRING_BUFFER_SIZE, "%s\n%s%ld\n", pComment, pParam, pConfigParam->ActiveSec); ParamString += StringBuffer; /* Set SleepSec. */ pComment = "; Positioning sleep sec(0-240)"; pParam = "SleepSec="; snprintf(StringBuffer, STRING_BUFFER_SIZE, "%s\n%s%ld\n", pComment, pParam, pConfigParam->SleepSec); ParamString += StringBuffer; /* Set UartDebugMessage. */ pComment = "; Uart debug message(NONE/ERROR/WARNING/INFO)"; pParam = "UartDebugMessage="; switch (pConfigParam->UartDebugMessage) { case PrintError: pData = "ERROR"; break; case PrintWarning: pData = "WARNING"; break; case PrintInfo: pData = "INFO"; break; case PrintNone: default: pData = "NONE"; break; } snprintf(StringBuffer, STRING_BUFFER_SIZE, "%s\n%s%s\n", pComment, pParam, pData); ParamString += StringBuffer; /* End of file. */ snprintf(StringBuffer, STRING_BUFFER_SIZE, "; EOF"); ParamString += StringBuffer; return ParamString; } /** * @brief Read the ini file and set it as a parameter. * * @details If there is no description, it will be the default value. * @param [out] pConfigParam Configuration parameters * @return 0 if success, -1 if failure */ static int ReadParameter(ConfigParam *pConfigParam) { char *pReadBuff = NULL; pReadBuff = (char*)malloc(CONFIG_FILE_SIZE); if (pReadBuff == NULL) { APP_PRINT_E("alloc error:"); APP_PRINT_E(CONFIG_FILE_NAME); APP_PRINT_E("\n"); return -1; } /* Read file. */ int ReadSize = 0; ReadSize = ReadChar(pReadBuff, CONFIG_FILE_SIZE, CONFIG_FILE_NAME, FILE_READ); if (ReadSize == 0) { APP_PRINT_E("read error:"); APP_PRINT_E(CONFIG_FILE_NAME); APP_PRINT_E("\n"); return -1; } /* Set NULL at EOF. */ pReadBuff[ReadSize] = NULL; /* Record the start position for each line. */ int CharCount; int LineCount = 0; boolean FindSeparator = true; char *LineList[128] = {0,}; for (CharCount = 0; CharCount < ReadSize; CharCount++) { if (FindSeparator == true) { LineList[LineCount] = &pReadBuff[CharCount]; FindSeparator = false; LineCount++; if (LineCount >= 128) { break; } else { /* nop */ } } if (pReadBuff[CharCount] == SEPARATOR) { FindSeparator = true; pReadBuff[CharCount] = NULL; } } /* Parse each line. */ int MaxLine = LineCount; char *pParamName; char *pParamData; int length; int tmp; for (LineCount = 0; LineCount < MaxLine; LineCount++) { pParamName = LineList[LineCount]; pParamData = NULL; if (pParamName[0] != ';') { length = strlen(pParamName); for (CharCount = 0; CharCount < length; CharCount++) { if (pParamName[CharCount] == '=') { pParamData = &(pParamName[CharCount + 1]); break; } } } /* Parse start. */ if (pParamData == NULL) { /* nop */ } else if (!ParamCompare(pParamName, "SatelliteSystem=")) { if (!ParamCompare(pParamData, "GPS+GLONASS+QZSS_L1CA")) { pConfigParam->SatelliteSystem = eSatGpsGlonassQz1c; } else if (!ParamCompare(pParamData, "GPS+BEIDOU+QZSS_L1CA")) { pConfigParam->SatelliteSystem = eSatGpsBeidouQz1c; } else if (!ParamCompare(pParamData, "GPS+GALILEO+QZSS_L1CA")) { pConfigParam->SatelliteSystem = eSatGpsGalileoQz1c; } else if (!ParamCompare(pParamData, "GPS+QZSS_L1CA+QZSS_L1S")) { pConfigParam->SatelliteSystem = eSatGpsQz1cQz1S; } else if (!ParamCompare(pParamData, "GPS+QZSS_L1CA")) { pConfigParam->SatelliteSystem = eSatGpsQz1c; } else if (!ParamCompare(pParamData, "GPS+GLONASS")) { pConfigParam->SatelliteSystem = eSatGpsGlonass; } else if (!ParamCompare(pParamData, "GPS+BEIDOU")) { pConfigParam->SatelliteSystem = eSatGpsBeidou; } else if (!ParamCompare(pParamData, "GPS+GALILEO")) { pConfigParam->SatelliteSystem = eSatGpsGalileo; } else if (!ParamCompare(pParamData, "GLONASS")) { pConfigParam->SatelliteSystem = eSatGlonass; } else if (!ParamCompare(pParamData, "GPS+SBAS")) { pConfigParam->SatelliteSystem = eSatGpsSbas; } else if (!ParamCompare(pParamData, "GPS")) { pConfigParam->SatelliteSystem = eSatGps; } else { pConfigParam->SatelliteSystem = eSatGpsGlonassQz1c; } } else if (!ParamCompare(pParamName, "NmeaOutUart=")) { if (!ParamCompare(pParamData, "FALSE")) { pConfigParam->NmeaOutUart = false; } else { pConfigParam->NmeaOutUart = true; } } else if (!ParamCompare(pParamName, "NmeaOutFile=")) { if (!ParamCompare(pParamData, "FALSE")) { pConfigParam->NmeaOutFile = false; } else { pConfigParam->NmeaOutFile = true; } } else if (!ParamCompare(pParamName, "BinaryOut=")) { if (!ParamCompare(pParamData, "FALSE")) { pConfigParam->BinaryOut = false; } else { pConfigParam->BinaryOut = true; } } else if (!ParamCompare(pParamName, "IntervalSec=")) { tmp = strtoul(pParamData, NULL, 10); pConfigParam->IntervalSec = max(1, min(tmp, 300)); } else if (!ParamCompare(pParamName, "ActiveSec=")) { tmp = strtoul(pParamData, NULL, 10); pConfigParam->ActiveSec = max(60, min(tmp, 300)); } else if (!ParamCompare(pParamName, "SleepSec=")) { tmp = strtoul(pParamData, NULL, 10); pConfigParam->SleepSec = max(0, min(tmp, 240)); } else if (!ParamCompare(pParamName, "UartDebugMessage=")) { if (!ParamCompare(pParamData, "NONE")) { pConfigParam->UartDebugMessage = PrintNone; } else if (!ParamCompare(pParamData, "ERROR")) { pConfigParam->UartDebugMessage = PrintError; } else if (!ParamCompare(pParamData, "WARNING")) { pConfigParam->UartDebugMessage = PrintWarning; } else if (!ParamCompare(pParamData, "INFO")) { pConfigParam->UartDebugMessage = PrintInfo; } } } return OK; } /** * @brief Create an ini file based on the current parameters. * * @param [in] pConfigParam Configuration parameters * @return 0 if success, -1 if failure */ static int WriteParameter(ConfigParam *pConfigParam) { String ParamString; int ret = -1; unsigned long write_size; /* Make parameter data. */ ParamString = MakeParameterString(pConfigParam); /* Write parameter data. */ if (strlen(ParamString.c_str()) != 0) { Led_isSdAccess(true); write_size = WriteChar(ParamString.c_str(), CONFIG_FILE_NAME, FILE_WRITE); Led_isSdAccess(false); if (write_size == strlen(ParamString.c_str())) { ret = 0; } else { Led_isError(true); } } return ret; } /** * @brief Setup configuration parameters. * * @return 0 if success, -1 if failure */ static int SetupParameter(void) { int ret; String ParamString; /* Read parameter file. */ ret = ReadParameter(&Parameter); if (ret != OK) { /* If there is no parameter file, create a new one. */ ret = WriteParameter(&Parameter); } /* Print parameter. */ ParamString = MakeParameterString(&Parameter); APP_PRINT(ParamString.c_str()); APP_PRINT("\n\n"); return ret; } /** * @brief Go to Sleep mode */ static void SleepIn(void) { /* Turn off the LED. */ APP_PRINT("Sleep "); ledOff(PIN_LED0); Gnss.stop(); Gnss.end(); // TBD:Further sleep processing will be implemented. APP_PRINT("in.\n"); } /** * @brief Go to Active mode. */ static void SleepOut(void) { APP_PRINT("Sleep "); // TBD:Further wakeup processing will be implemented. Gnss.begin(); Gnss.start(HOT_START); APP_PRINT("out.\n"); } /** * @brief Get file number. * * @return File count */ unsigned long GetFileNumber(void) { int FileCount; char IndexData[INDEX_FILE_SIZE]; int ReadSize = 0; /* Open index file. */ ReadSize = ReadChar(IndexData, INDEX_FILE_SIZE, INDEX_FILE_NAME, FILE_READ); if (ReadSize != 0) { /* Use index data. */ FileCount = strtoul(IndexData, NULL, 10); FileCount++; Remove(INDEX_FILE_NAME); } else { /* Init file count. */ FileCount = 1; } /* Update index.txt */ snprintf(IndexData, sizeof(IndexData), "%08d", FileCount); WriteChar(IndexData, INDEX_FILE_NAME, FILE_WRITE); return FileCount; } /** * @brief Setup positioning. * * @return 0 if success, 1 if failure */ static int SetupPositioning(void) { int error_flag = 0; /* Set default Parameter. */ Parameter.SatelliteSystem = eSatGpsGlonassQz1c; Parameter.NmeaOutUart = true; Parameter.NmeaOutFile = true; Parameter.BinaryOut = false; Parameter.IntervalSec = DEFAULT_INTERVAL_SEC; Parameter.ActiveSec = DEFAULT_ACTIVE_SEC; Parameter.SleepSec = DEFAULT_SLEEP_SEC; Parameter.UartDebugMessage = PrintNone; /* Mount SD card. */ if (BeginSDCard() != true) { /* Error case.*/ APP_PRINT_E("SD begin error!!\n"); error_flag = 1; } else { /* Setup Parameter. */ SetupParameter(); } /* Set Gnss debug mode. */ Gnss.setDebugMode(Parameter.UartDebugMessage); AppDebugPrintLevel = (AppPrintLevel)Parameter.UartDebugMessage; if (Gnss.begin(Serial) != 0) { /* Error case. */ APP_PRINT_E("Gnss begin error!!\n"); error_flag = 1; } else { APP_PRINT_I("Gnss begin OK.\n"); switch (Parameter.SatelliteSystem) { case eSatGps: Gnss.select(GPS); break; case eSatGpsSbas: Gnss.select(GPS); Gnss.select(SBAS); break; case eSatGlonass: Gnss.select(GLONASS); Gnss.deselect(GPS); break; case eSatGpsGlonass: Gnss.select(GPS); Gnss.select(GLONASS); break; case eSatGpsBeidou: Gnss.select(GPS); Gnss.select(BEIDOU); break; case eSatGpsGalileo: Gnss.select(GPS); Gnss.select(GALILEO); break; case eSatGpsQz1c: Gnss.select(GPS); Gnss.select(QZ_L1CA); break; case eSatGpsQz1cQz1S: Gnss.select(GPS); Gnss.select(QZ_L1CA); Gnss.select(QZ_L1S); break; case eSatGpsBeidouQz1c: Gnss.select(GPS); Gnss.select(BEIDOU); Gnss.select(QZ_L1CA); break; case eSatGpsGalileoQz1c: Gnss.select(GPS); Gnss.select(GALILEO); Gnss.select(QZ_L1CA); break; case eSatGpsGlonassQz1c: default: Gnss.select(GPS); Gnss.select(GLONASS); Gnss.select(QZ_L1CA); break; } Gnss.setInterval(Parameter.IntervalSec); if (Gnss.start(HOT_START) != OK) { /* Error case. */ APP_PRINT_E("Gnss start error!!\n"); error_flag = 1; } } /* Create output file name. */ FilenameTxt[0] = 0; FilenameBin[0] = 0; if ( (Parameter.NmeaOutFile == true) || (Parameter.BinaryOut == true) ) { int FileCount = GetFileNumber(); if (Parameter.NmeaOutFile == true) { /* Create a file name to store NMEA data. */ snprintf(FilenameTxt, sizeof(FilenameTxt), "%08d.txt", FileCount); } if (Parameter.BinaryOut == true) { /* Create a file name to store binary data. */ snprintf(FilenameBin, sizeof(FilenameBin), "%08d.bin", FileCount); } } return error_flag; } /** * @brief Activate GNSS device and setup positioning */ void setup() { /* put your setup code here, to run once: */ int error_flag = 0; char KeyRead[2] = {0, 0}; /* Initialize the serial first for debug messages. */ /* Set serial baudeate. */ Serial.begin(SERIAL_BAUDRATE); APP_PRINT("Please specify the operation mode.\n"); APP_PRINT(" 0:Run positioning. Output NMEA text.\n"); APP_PRINT("\n"); /* Wait mode select. */ sleep(3); /* Turn on all LED:Setup start. */ ledOn(PIN_LED0); ledOn(PIN_LED1); ledOn(PIN_LED2); ledOn(PIN_LED3); /* Read key input. */ KeyRead[0] = Serial.read(); /* Convet to mode value. */ Mode = strtoul(KeyRead, NULL, 10); APP_PRINT("set mode : "); APP_PRINT(Mode); APP_PRINT("\n"); switch (Mode) { #if 0 // TBD:Not implemented case eModeShell: /* nop */ break; #endif case eModeNormal: default: error_flag = SetupPositioning(); break; } SetActiveSec = INITIAL_ACTIVE_TIME; /* Turn off all LED:Setup done. */ ledOff(PIN_LED0); ledOff(PIN_LED1); ledOff(PIN_LED2); ledOff(PIN_LED3); /* Set error LED. */ if (error_flag == 1) { Led_isError(true); } } /** * @brief GNSS tracker loop * * @details Positioning is performed for the first 300 seconds after setup. * After that, in each loop processing, it sleeps for SleepSec * seconds and performs positioning ActiveSec seconds. * The gnss_tracker use SatelliteSystem sattelites for positioning.\n\n * * Positioning result is notificated in every IntervalSec second. * The result formatted to NMEA will be saved on SD card if the * parameter NmeaOutFile is TRUE, or/and output to UART if the * parameter NmeaOutUart is TRUE. NMEA is buffered for each * notification. Write at once when ActiveSec completes. If SleepSec * is set to 0, positioning is performed continuously. */ void loop() { static int State = eStateActive; static int TimeOut = IDLE_ACTIVE_TIME; static bool PosFixflag = false; static char *pNmeaBuff = NULL; static char *pBinaryBuffer = NULL; /* Check state. */ if (State == eStateSleep) { /* Sleep. */ TimeOut--; sleep(1); APP_PRINT(">"); /* Counter Check. */ if (TimeOut <= 0) { APP_PRINT("\n"); /* Set active timeout. */ TimeOut = IDLE_ACTIVE_TIME; SetActiveSec = Parameter.ActiveSec; /* Set new mode. */ State = eStateActive; /* Go to Active mode. */ SleepOut(); } else if ((TimeOut % 60) == 0) { APP_PRINT("\n"); } } else { /* Active. */ unsigned long BuffSize; unsigned long WriteSize; bool LedSet; TimeOut -= Parameter.IntervalSec; SpNavData NavData; String NmeaString = ""; /* Blink LED. */ Led_isActive(); int WriteRequest = false; /* Check update. */ if (Gnss.waitUpdate(Parameter.IntervalSec)) { /* Get NavData. */ Gnss.getNavData(&NavData); LedSet = ((NavData.posDataExist) && (NavData.posFixMode != FixInvalid)); if(PosFixflag != LedSet) { Led_isPosfix(LedSet); PosFixflag = LedSet; if(LedSet == true) { TimeOut = SetActiveSec; WriteRequest = true; } } /* Get Nmea Data. */ NmeaString = getNmeaGga(&NavData); if (strlen(NmeaString.c_str()) == 0) { /* Error case. */ APP_PRINT_E("getNmea error"); Led_isError(true); } else { /* Output Nmea Data. */ if (Parameter.NmeaOutUart == true) { /* To Uart. */ APP_PRINT(NmeaString.c_str()); } if (Parameter.NmeaOutFile == true) { /* To SDCard. */ BuffSize = NMEA_BUFFER_SIZE * (IDLE_ACTIVE_TIME / Parameter.IntervalSec); if (pNmeaBuff == NULL) { /* Alloc buffer. */ pNmeaBuff = (char*)malloc(BuffSize); if (pNmeaBuff != NULL) { /* Clear Buffer */ pNmeaBuff[0] = 0x00; } } if (pNmeaBuff != NULL) { /* Store Nmea Data to buffer. */ strncat(pNmeaBuff, NmeaString.c_str(), BuffSize); } } /* Output Binary Data. */ if (Parameter.BinaryOut == true) { BuffSize = Gnss.getPositionDataSize(); if (pBinaryBuffer == NULL) { /* Alloc buffer. */ pBinaryBuffer = (char*)malloc(Gnss.getPositionDataSize()); if (pBinaryBuffer != NULL) { /* Clear Buffer. */ pBinaryBuffer[0] = 0x00; } } if (pBinaryBuffer != NULL) { if (Gnss.getPositionData(pBinaryBuffer) == BuffSize) { /* Write Binary Data. */ GnssPositionData *pAdr = (GnssPositionData*)pBinaryBuffer; Led_isSdAccess(true); WriteSize = WriteBinary((char*)&pAdr->MagicNumber, FilenameBin, sizeof(pAdr->MagicNumber), (FILE_WRITE | O_APPEND)); WriteSize += WriteBinary((char*)&pAdr->Data, FilenameBin, sizeof(pAdr->Data), (FILE_WRITE | O_APPEND)); WriteSize += WriteBinary((char*)&pAdr->CRC, FilenameBin, sizeof(pAdr->CRC), (FILE_WRITE | O_APPEND)); Led_isSdAccess(false); /* Check result. */ if (WriteSize != BuffSize) { Led_isError(true); } } } } } } /* Counter Check. */ if (TimeOut <= 0) { if (Parameter.SleepSec > 0) { /* Set new mode. */ State = eStateSleep; /* Go to Sleep mode. */ SleepIn(); /* Set sleep timeout. */ TimeOut = Parameter.SleepSec; } else { /* Set sleep timeout. */ TimeOut = Parameter.SleepSec; } WriteRequest = true; } /* Check NMEA buffer. */ if(strlen(pNmeaBuff) > (BuffSize - NMEA_BUFFER_SIZE)) { /* There is no capacity for writing in the next NMEA. */ } /* Write NMEA data. */ if(WriteRequest == true) { if (pNmeaBuff != NULL) { /* Write Nmea Data. */ Led_isSdAccess(true); WriteSize = WriteChar(pNmeaBuff, FilenameTxt, (FILE_WRITE | O_APPEND)); Led_isSdAccess(false); /* Check result. */ if (WriteSize != strlen(pNmeaBuff)) { Led_isError(true); } /* Clear Buffer */ pNmeaBuff[0] = 0x00; } } } } ``` GNSSデータの書き込み先がサンプルデータの状態だとSDカードになっているのでELTRESを用いてWebサーバに送信できるようにする。++ELTRESで送信予定でしたが1分間に1度しか送信せず、正確な位置情報を送信できないためSDカードに保存する状態のまま行っています。対策は検討中です。++ **実装** - SPRESENSE™ メインボード、SPRESENSE™ 拡張ボード、ELTRES Add-onボードを接続し上のコードをSPRESENSEに書き込みます。 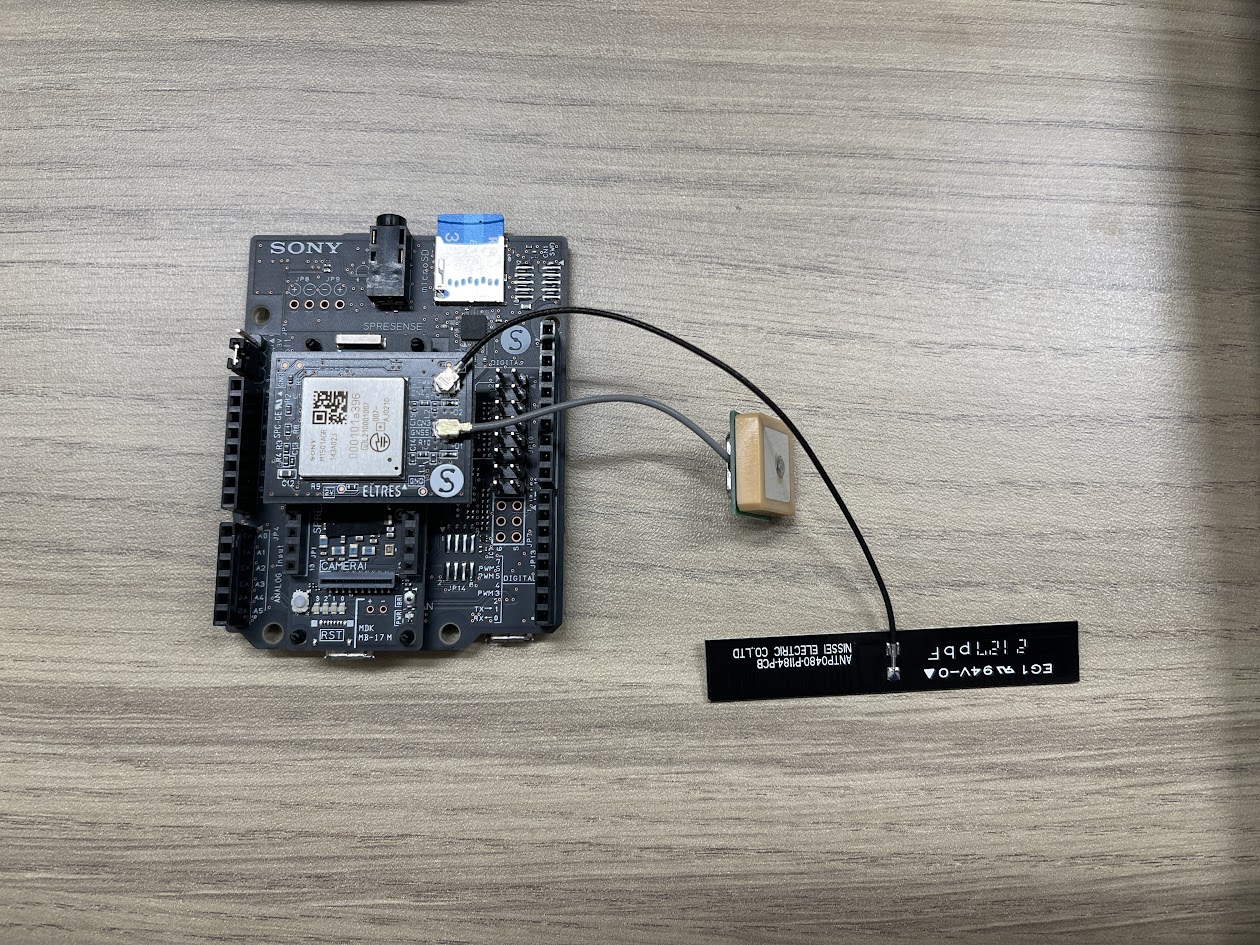 作成したSPRESENSEをバスに持ち込み動作確認を行いました。 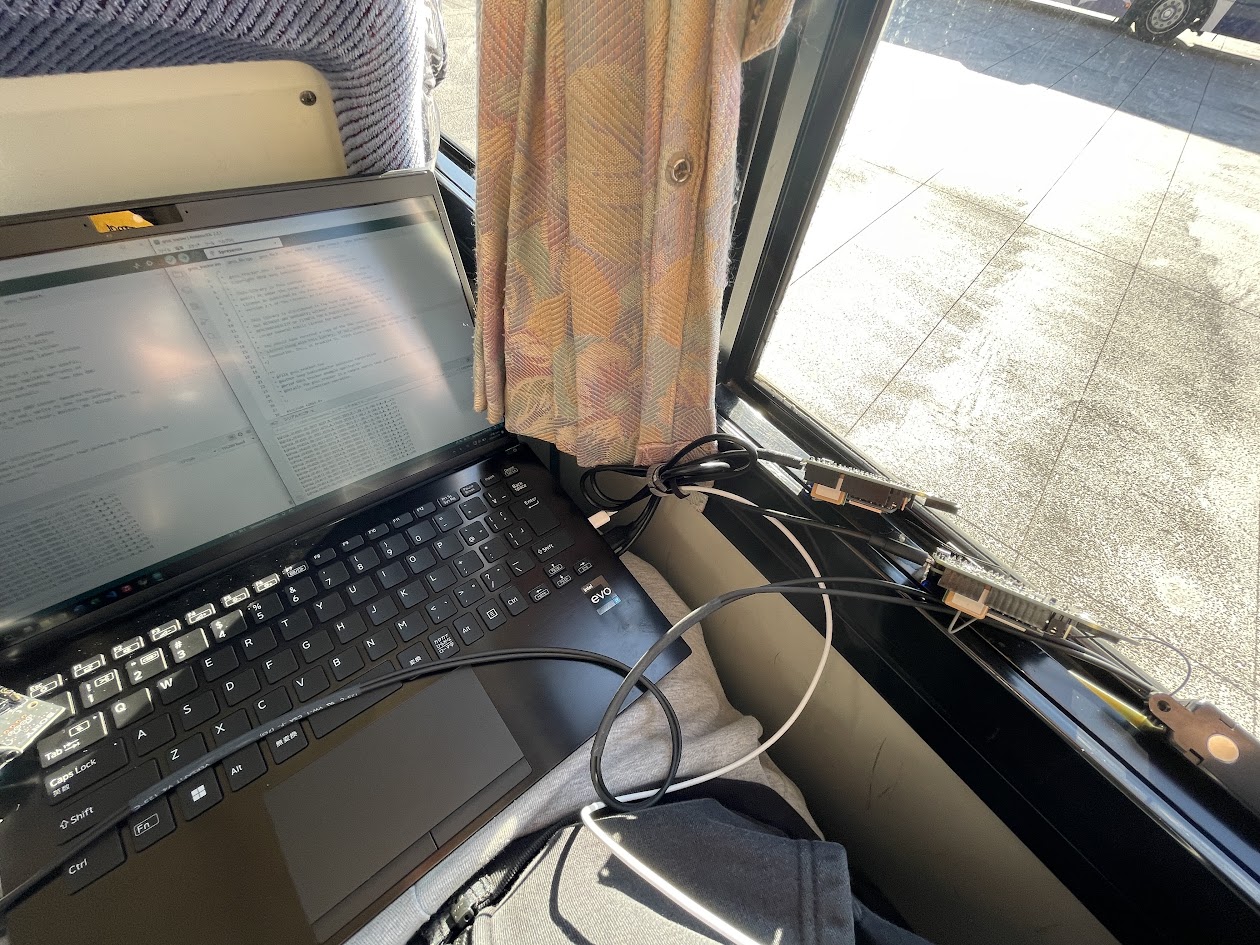 八王子駅を出発したところ↓  GNSSデータをSDカードの保存することになってしまいましたがGNSSを受信することに成功しました。 以下が計測したデータです。 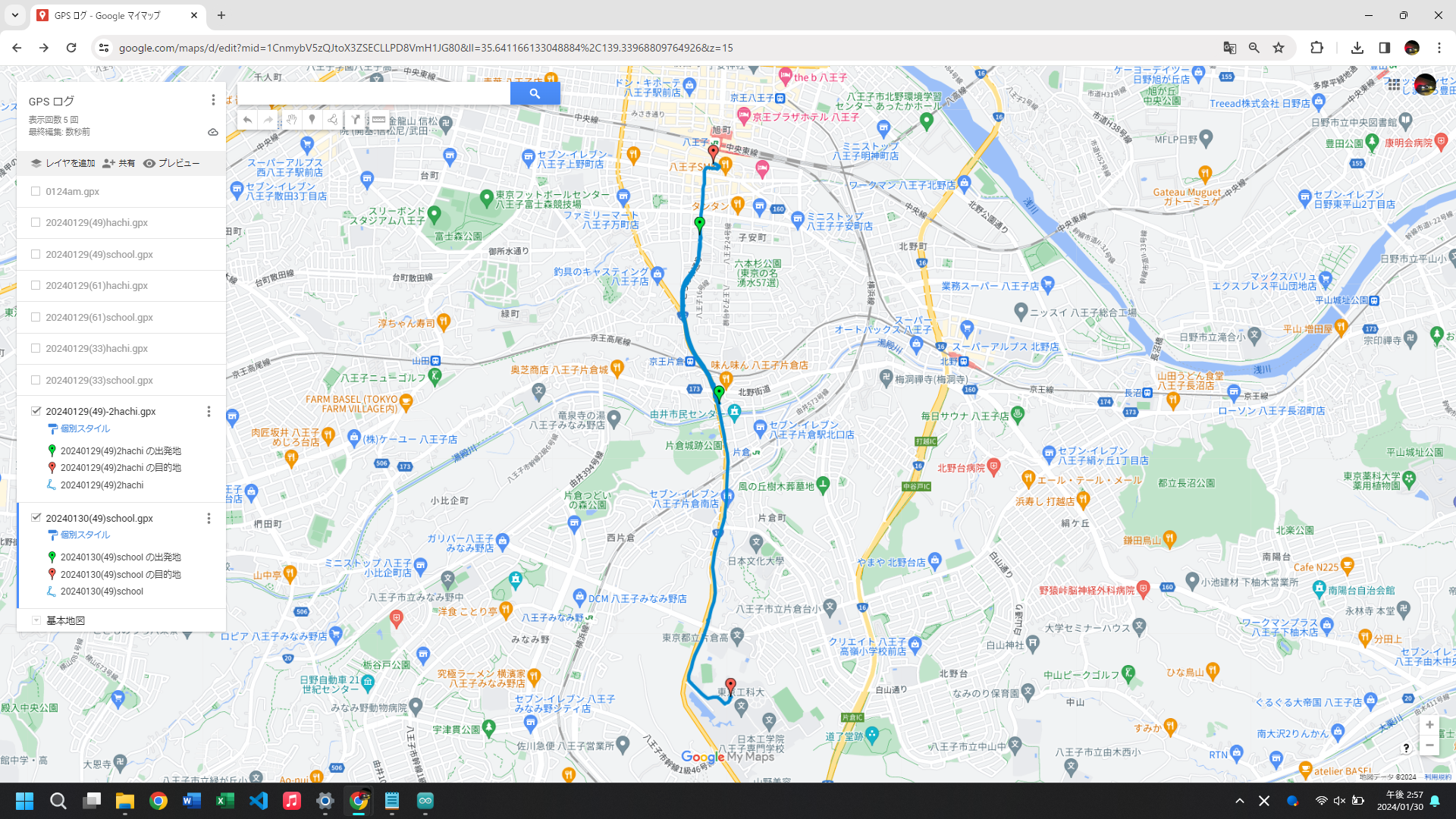 GNSSの受信が途切れてしまうこともあり、これは改善点です。 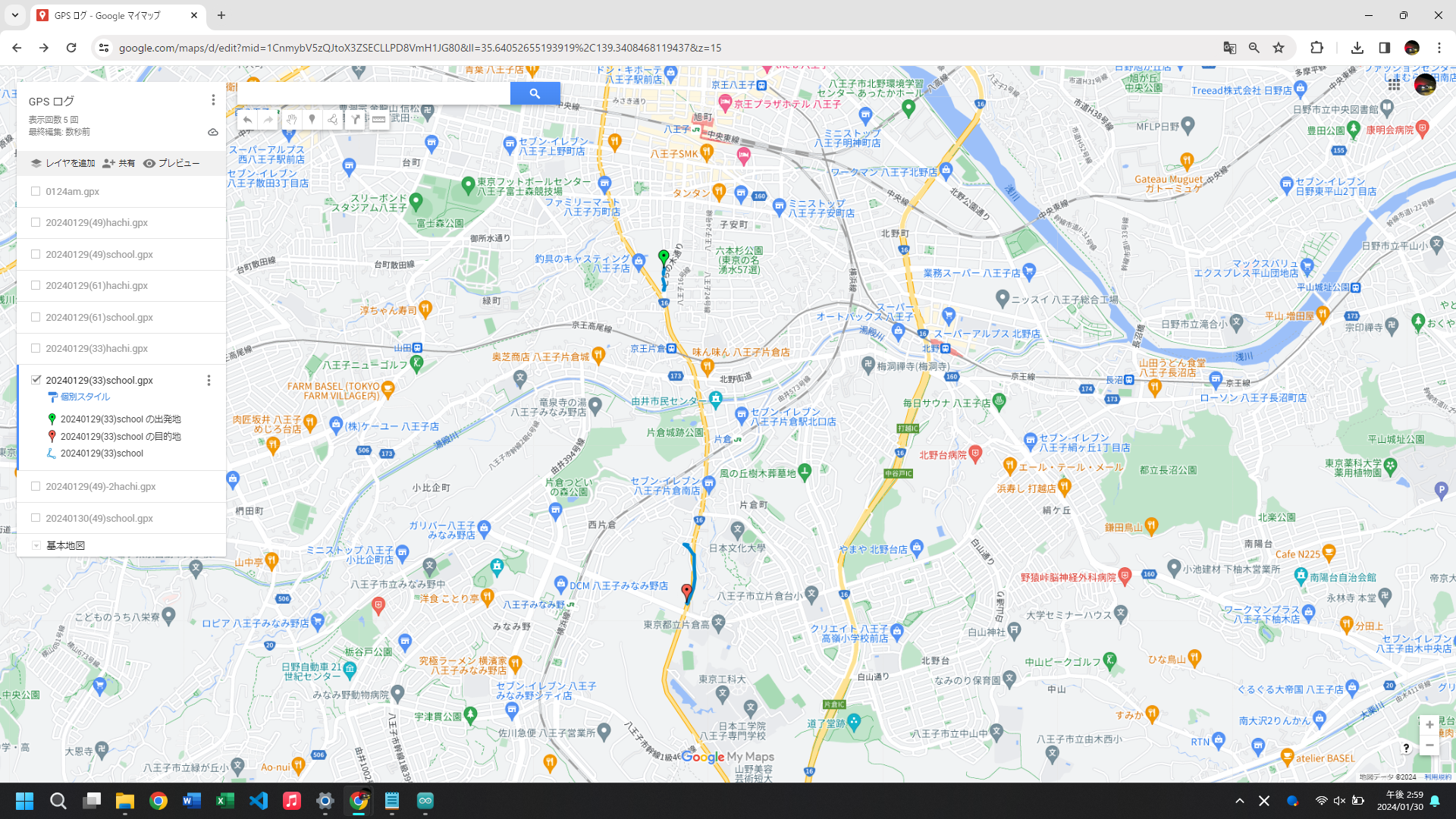 計測データのリンクです。 https://www.google.com/maps/d/edit?mid=1CnmybV5zQJtoX3ZSECLLPD8VmH1JG80&usp=sharing