TentoBug が 2025年01月26日14時49分30秒 に編集
割込み
本文の変更
# はじめに SPRESENSEに、どのような機能があるかを確認することを年末年始とコンテストの目標にしました。さわっているうちにGPIOやI2Cやパソコンのシリアルポートと通信ができることが分かりました。さらにGNSSを利用して位置情報の機能があることを知りました。なにか実験してみようと思って、教科書を眺めていますと 等速円運動の大きさ $v =r \omega$ 加速度の大きさ $a =r \omega^2$ 向心力 $F =\frac{mv^2}{r}$ が目に入り、  という具合に袋にSPRESENSEを入れて回すか、グルグル走るかしたら、なんか見えるのかなと思い図工しだしました。 今のところI2Cを用いた表示とパソコンとの通信はできましたが、室内で速度vとωの確認で行き詰った感じです。その記録です。 # 部品 || 部品 | 備考(敬称略) | |:---:|:---:|:---:| |U1、U3| SPRESENSE | | |U2| MM-TXS01 | サンハヤト | |U4| AE-AQM0802 | 秋月電子通商 | |D1| LED(赤) | | |D2| LED(黄) | |
|U5| RPR-220 | ローム |
|| 減速機 | タミヤ | || 安定化電源 | |
|| USBケーブル | ジャンク品 | || 電池BOX | |
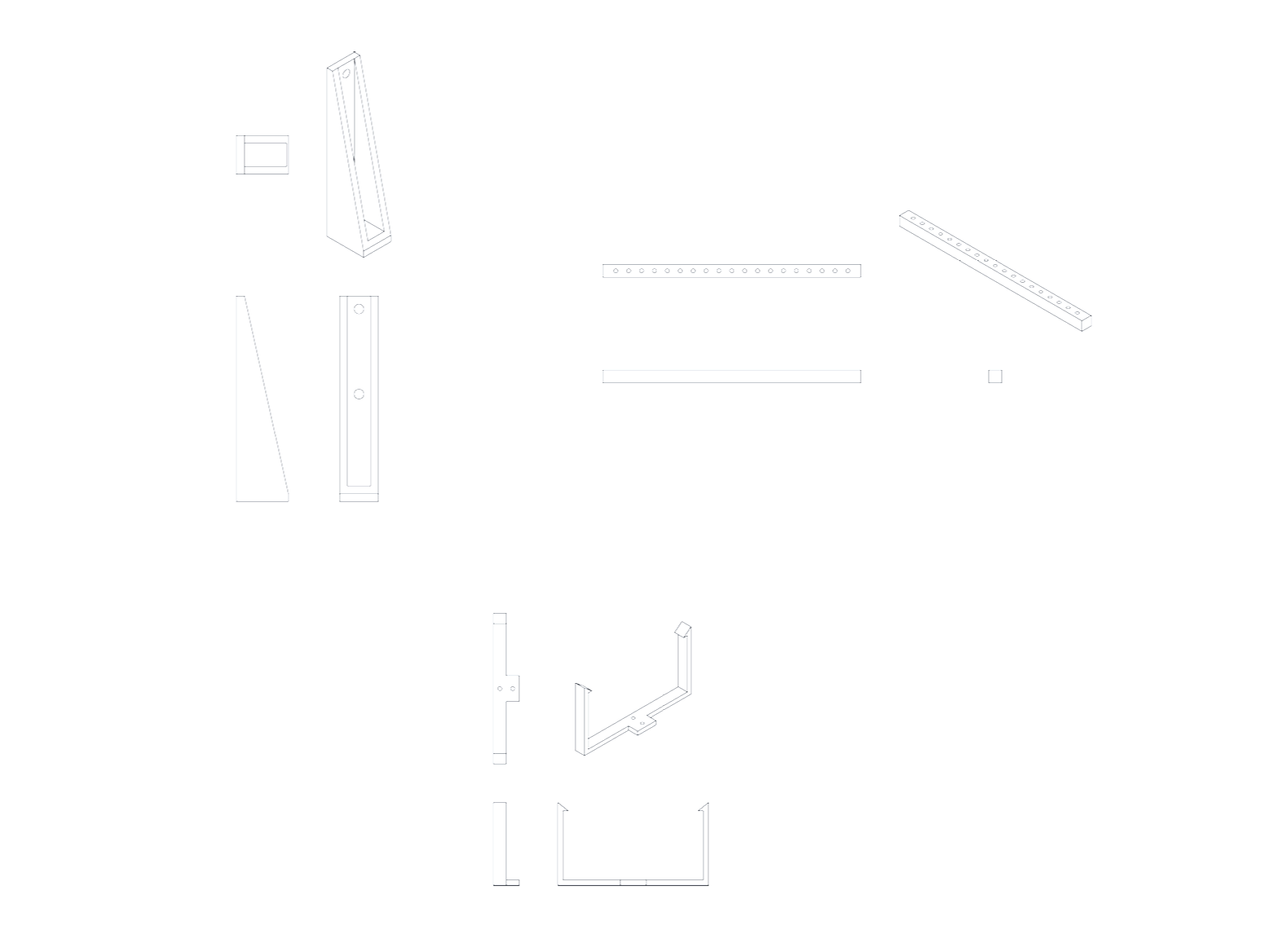
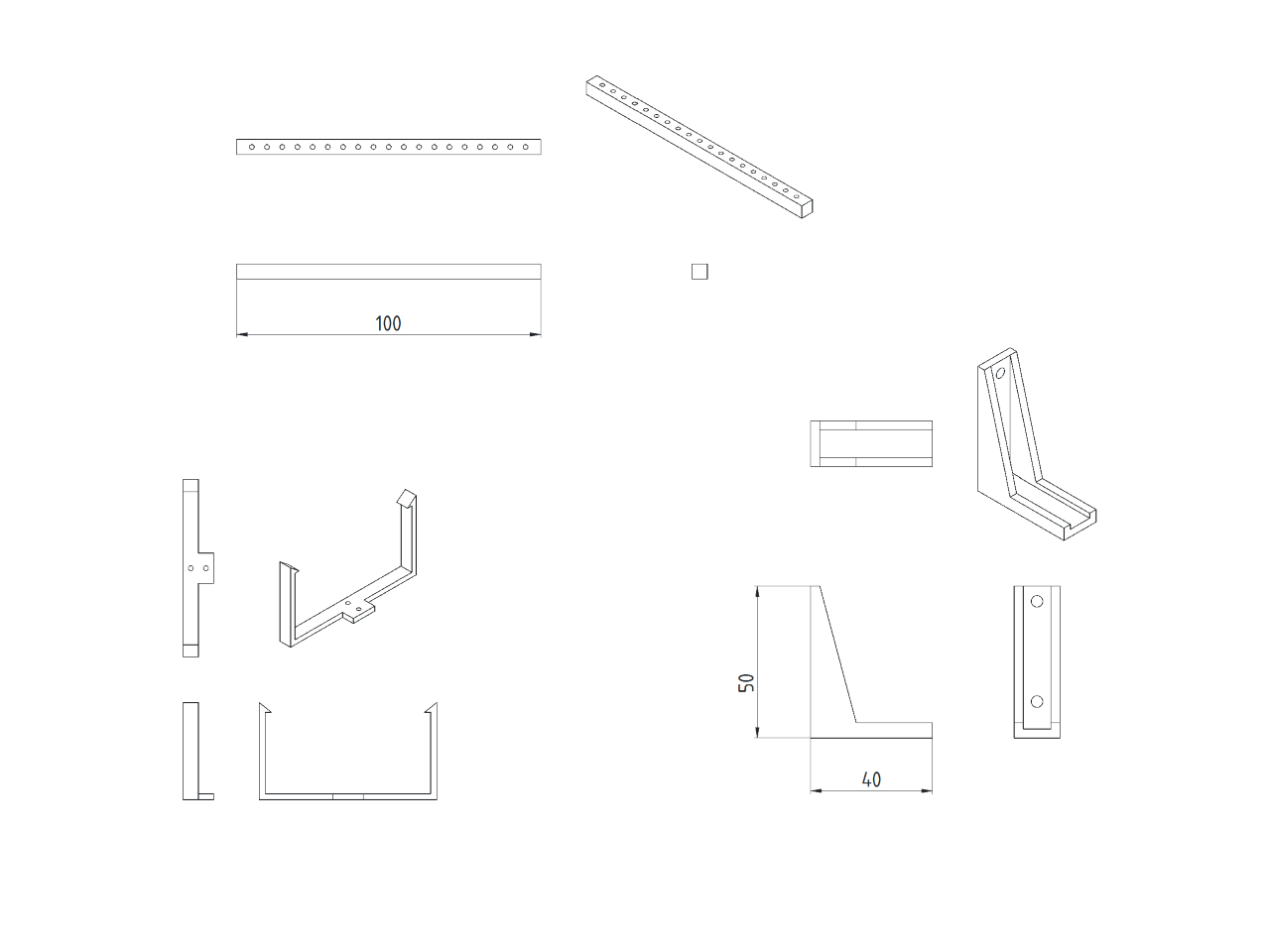
# 設計図
 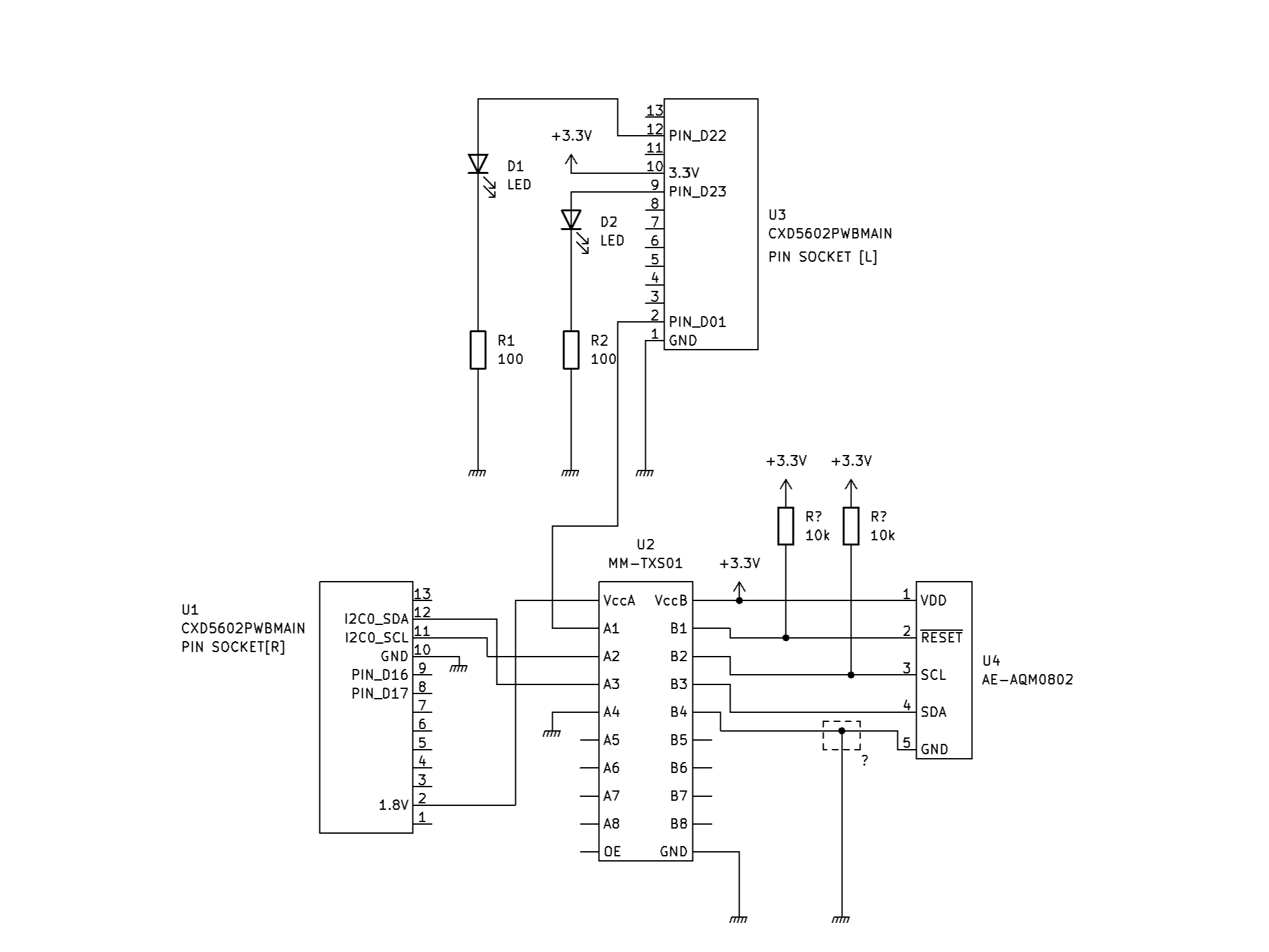 
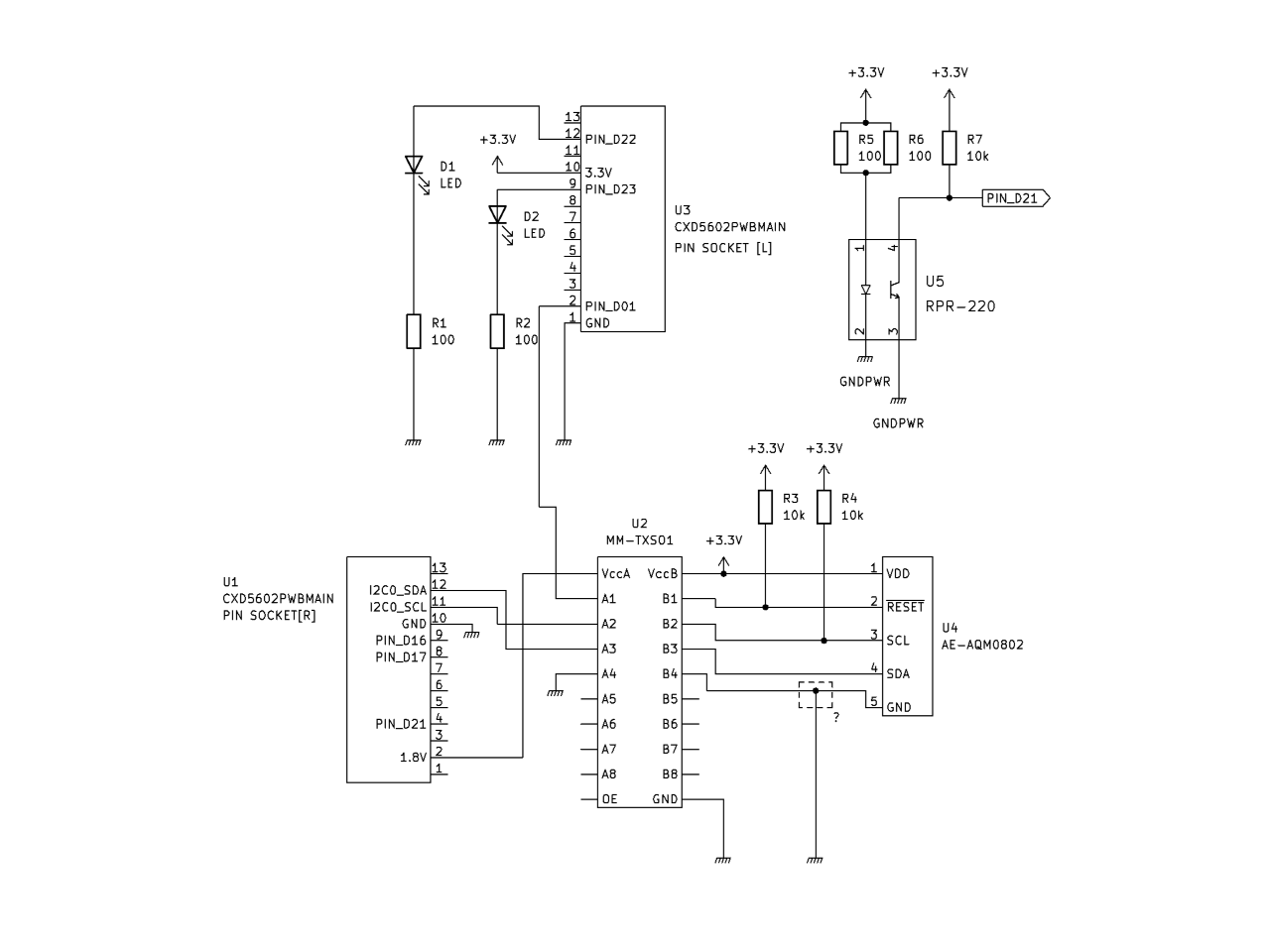
PIN_D16やPIN_D17にハイ電圧をかけることで、3種類のケースに分けます。
# ソースコード 2024年 SPRESENSE™ 活用コンテストのチュートリアルにあるArduino IDEで作成しました。付属スケッチ例にあるgnssをを素にして作成しました。 ```arduino:実験中 #include <time.h> #include <FFT.h> #include <GNSS.h> #include <Wire.h>/* I2C*/ #include <Flash.h> #include <File.h> #define STRING_BUFFER_SIZE 128 /**< %Buffer size */ static SpGnss Gnss; /**< SpGnss object */ int duty=0; File FlashFile;
uint64_t btime=0; unsigned long syuki=0;
unsigned int warikomi(void){ digitalWrite(PIN_D22, HIGH); delayMicroseconds(duty); digitalWrite(PIN_D22, LOW); delayMicroseconds(500-duty); return 500; }
unsigned int photosensor(void){ syuki=(unsigned long)(millis()-btime); btime=millis(); return 1; }
void lcdClear(){ char command[]={0x38,0x01}; Wire.beginTransmission(0x3E); Wire.write(command,2); Wire.endTransmission(); delay(200); } void lcd1(char* StringBuffer){ Wire.beginTransmission(0x3E); Wire.write(0x00); Wire.write(0x80); Wire.endTransmission(); delay(1); Wire.beginTransmission(0x3E); Wire.write(0x40); Wire.write(StringBuffer,8); Wire.endTransmission(); delay(1); } void lcd2(char* StringBuffer){ Wire.beginTransmission(0x3E); Wire.write(0x00); Wire.write(0x80+0x40); Wire.endTransmission(); delay(1); Wire.beginTransmission(0x3E); Wire.write(0x40);
Wire.write(StringBuffer,7);
Wire.write(StringBuffer,8);
Wire.endTransmission(); delay(1); } void setup() { char StringBuffer[STRING_BUFFER_SIZE]; /* ポートの設定 */ pinMode(PIN_D02, OUTPUT); pinMode(PIN_D22, OUTPUT); pinMode(PIN_D23, OUTPUT);
pinMode(PIN_D21, INPUT_PULLDOWN);
pinMode(PIN_D16, INPUT_PULLDOWN); pinMode(PIN_D17, INPUT_PULLDOWN); /* シリアル通信設定 */ Serial.begin(115200); sleep(3);
attachInterrupt(PIN_D21, photosensor, RISING);
attachTimerInterrupt(warikomi,500);//us duty=0;
syuki=0;
/*LCDモジュール初期化*/ int i=0; char command[]={0x38,0x39,0x14,0x70,0x56,0x6C,0x38,0x0C,0x01}; digitalWrite(PIN_D02, LOW); delay(200); digitalWrite(PIN_D02, HIGH); Wire.begin(); delay(200); Wire.beginTransmission(0x3E); Wire.write(command,9); Wire.endTransmission(); delay(200); snprintf(StringBuffer, STRING_BUFFER_SIZE, "setup "); lcd1(StringBuffer); /* Set serial baudrate. */ Serial.begin(115200); /* Set Debug mode to Info */ Gnss.setDebugMode(PrintInfo); int result; /* Activate GNSS device */ result = Gnss.begin(); Gnss.select(GPS); Gnss.select(QZ_L1S); Gnss.select(QZ_L1CA); Gnss.setInterval(SpInterval_10Hz); /* Start positioning */ result = Gnss.start(COLD_START); } static void print_0(SpNavData *pNavData) { char StringBuffer[STRING_BUFFER_SIZE];
int e=0;
struct tm now;
int e=0;
/* 日本時間の設定 日付?*/ now.tm_year =pNavData->time.year; now.tm_mon =pNavData->time.month; now.tm_mday =pNavData->time.day; now.tm_hour =pNavData->time.hour+9; now.tm_min =pNavData->time.minute; now.tm_sec =pNavData->time.sec; //mktime(&now); snprintf(StringBuffer, STRING_BUFFER_SIZE, "%02d:%02d:%02d,%f,%3.3f,%d", now.tm_hour,// pNavData->time.minute, pNavData->time.sec, pNavData->direction, pNavData->velocity, //速さ duty ); Serial.print(StringBuffer); Serial.println(""); /* LCD2行目 */
snprintf(StringBuffer, STRING_BUFFER_SIZE, "%2d %3.2f",
snprintf(StringBuffer, STRING_BUFFER_SIZE, "%2d %5ld",
pNavData->numSatellites,
pNavData->direction);
syuki);
lcd2(StringBuffer); /* LCD1行目 */ snprintf(StringBuffer, STRING_BUFFER_SIZE, "%02d:%02d:%02d", now.tm_hour,// pNavData->time.minute, pNavData->time.sec); lcd1(StringBuffer); } static void print_1(SpNavData *pNavData) { char StringBuffer[STRING_BUFFER_SIZE];
int e=0;
struct tm now;
int e=0;
/* 日本時間の設定 日付?*/ now.tm_year =pNavData->time.year; now.tm_mon =pNavData->time.month; now.tm_mday =pNavData->time.day; now.tm_hour =pNavData->time.hour+9; now.tm_min =pNavData->time.minute; now.tm_sec =pNavData->time.sec; snprintf(StringBuffer, STRING_BUFFER_SIZE, "%02d %02d %2d", pNavData->time.minute, pNavData->time.sec, pNavData->numSatellites ); /* LCD1行目 */ lcd1(StringBuffer); if (pNavData->posDataExist == 1){ duty=250;
snprintf(StringBuffer, STRING_BUFFER_SIZE, "%02d:%02d:%02d.%06ld,%6f,%6f,%3.3f,%3.3f,%3.3f,%d",
snprintf(StringBuffer, STRING_BUFFER_SIZE, "%02d:%02d:%02d.%06ld,%6f,%6f,%3.3f,%3.3f,%3.3f,%d,%5ld",
now.tm_hour,// pNavData->time.minute, pNavData->time.sec, pNavData->time.usec, pNavData->latitude, pNavData->longitude, pNavData->direction,//角度 pNavData->velocity, //速さ pNavData->altitude,
pNavData->numSatellites//衛星
pNavData->numSatellites,//衛星 syuki
); Serial.print(StringBuffer); Serial.println(""); //Flash.begin(); File f=Flash.open("shimako/data.csv",FILE_WRITE); f.println(StringBuffer); f.close(); /* LCD2行目 */
snprintf(StringBuffer, STRING_BUFFER_SIZE, " go ");
snprintf(StringBuffer, STRING_BUFFER_SIZE, "%2d %5ld", pNavData->numSatellites, syuki);
lcd2(StringBuffer); }else{ duty=0; snprintf(StringBuffer, STRING_BUFFER_SIZE, "wait...."); lcd2(StringBuffer); } } /* ファイルの読み込んで送信 */ void r() { lcdClear(); lcd1("r "); FlashFile = Flash.open("shimako/data.csv"); if (FlashFile) { Serial.println("data.csv"); while (FlashFile.available()) { Serial.write(FlashFile.read()); } Serial.print("\r\n"); //受け側による。タイムアウト・・・。 FlashFile.close(); } else { /* ファイルがない時 */ Serial.println("error"); } } /* ? */ void d(){ lcdClear(); lcd1("d "); Serial.println("filepath"); String filepath; Flash.exists(filepath); Serial.println(filepath); } /* 初期化 */ void f(){ lcdClear(); lcd1("f "); Serial.println("format"); Flash.format(); Flash.mkdir("shimako/"); Serial.println("good"); } int ad=0; int hugo=1; SpNavData NavData; void loop() { int sw=digitalRead(PIN_D16)+2*digitalRead(PIN_D17); //メニュー switch (sw){ case 0: Gnss.getNavData(&NavData); print_0(&NavData); break; case 1: if(Gnss.isUpdate()==1){ Gnss.getNavData(&NavData); print_1(&NavData); } break; case 2: unsigned int SelialCom; //lcdClear(); lcd1("r f d "); lcd2(" "); SelialCom=Serial.read(); switch(SelialCom){ case 'r': r(); break; case 'f': f(); break; case 'd': d(); break; } break; } }
```
# 実験1 1. PIN_D16にハイ電圧、PIN_D17を浮かすはセーフ?(プルダウンの設定をしていたら?) 2. 靴を履いたり休んだり階段歩いたり散歩してみました。
# 実験 1. 3Dプリンタで固定具を印刷して、減速機などを固定します。減速機の六角棒は40mmに切断しました。反射センサーの目印として100mm x 20mmの紙片を置きます。 2. 横棒の上にSPRESENSEなどを中心から15cm位の場所に固定します。 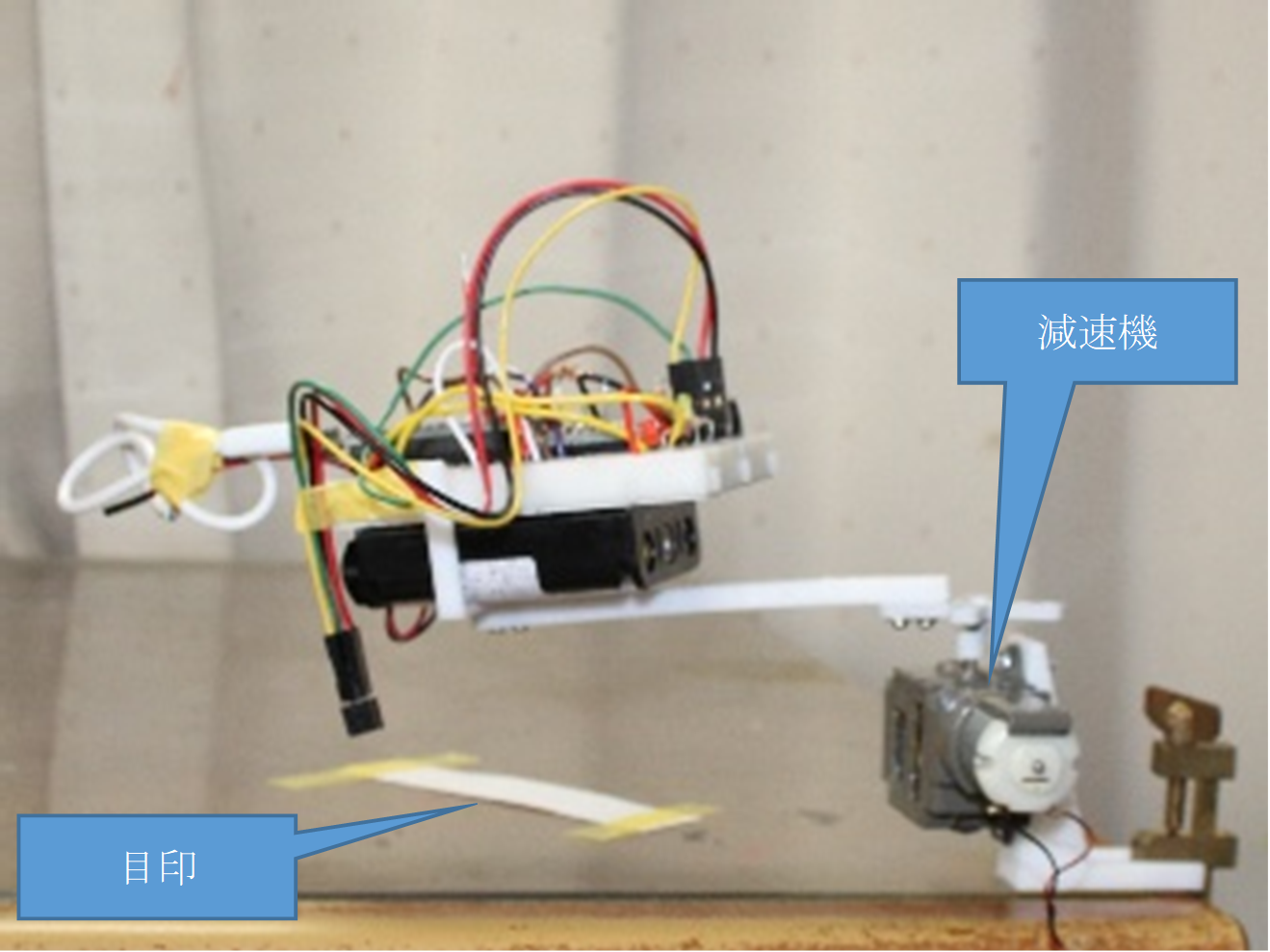 だいぶ傾いています。印刷時に厚みとか調整したほうが良さそう。 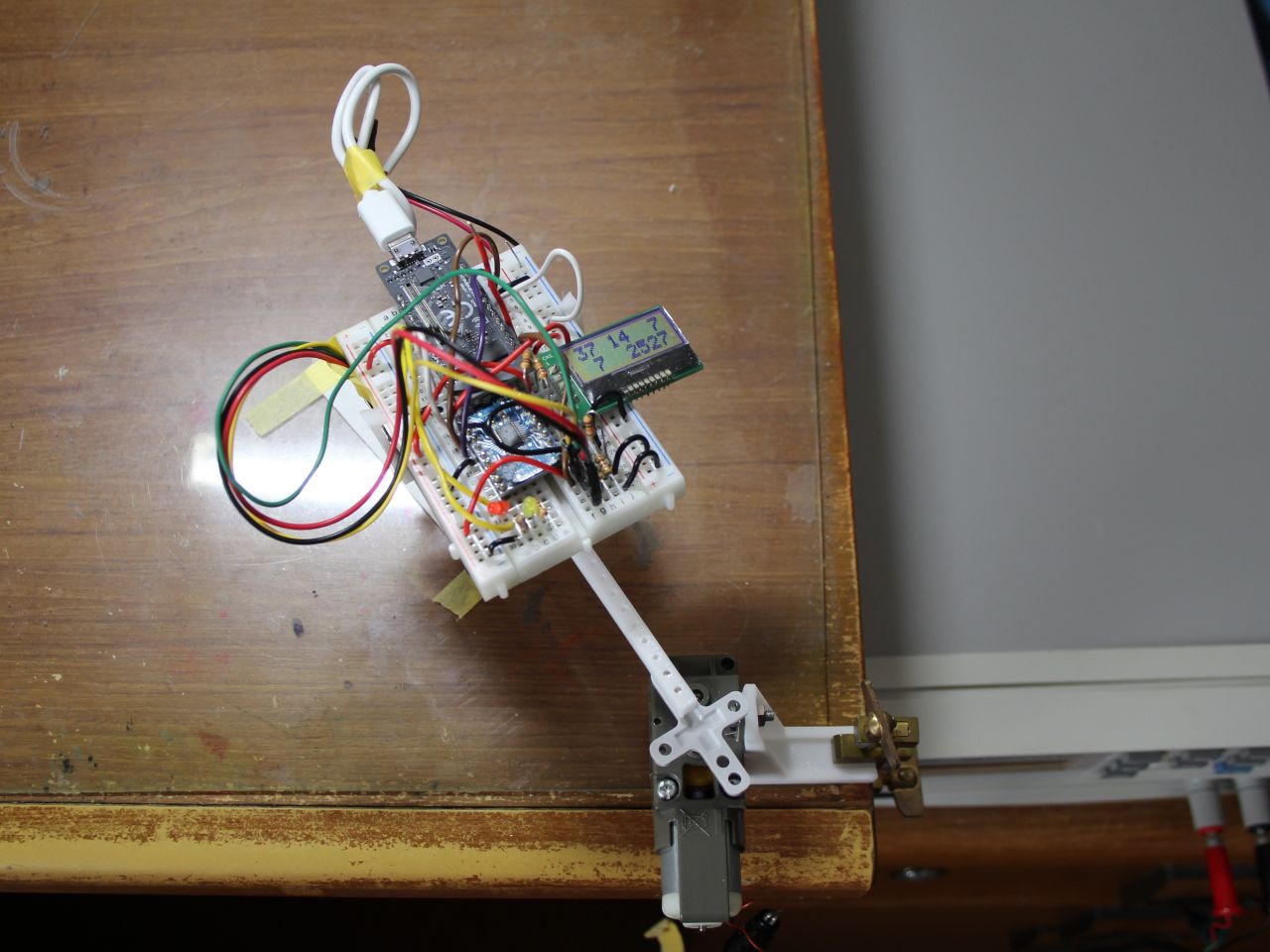
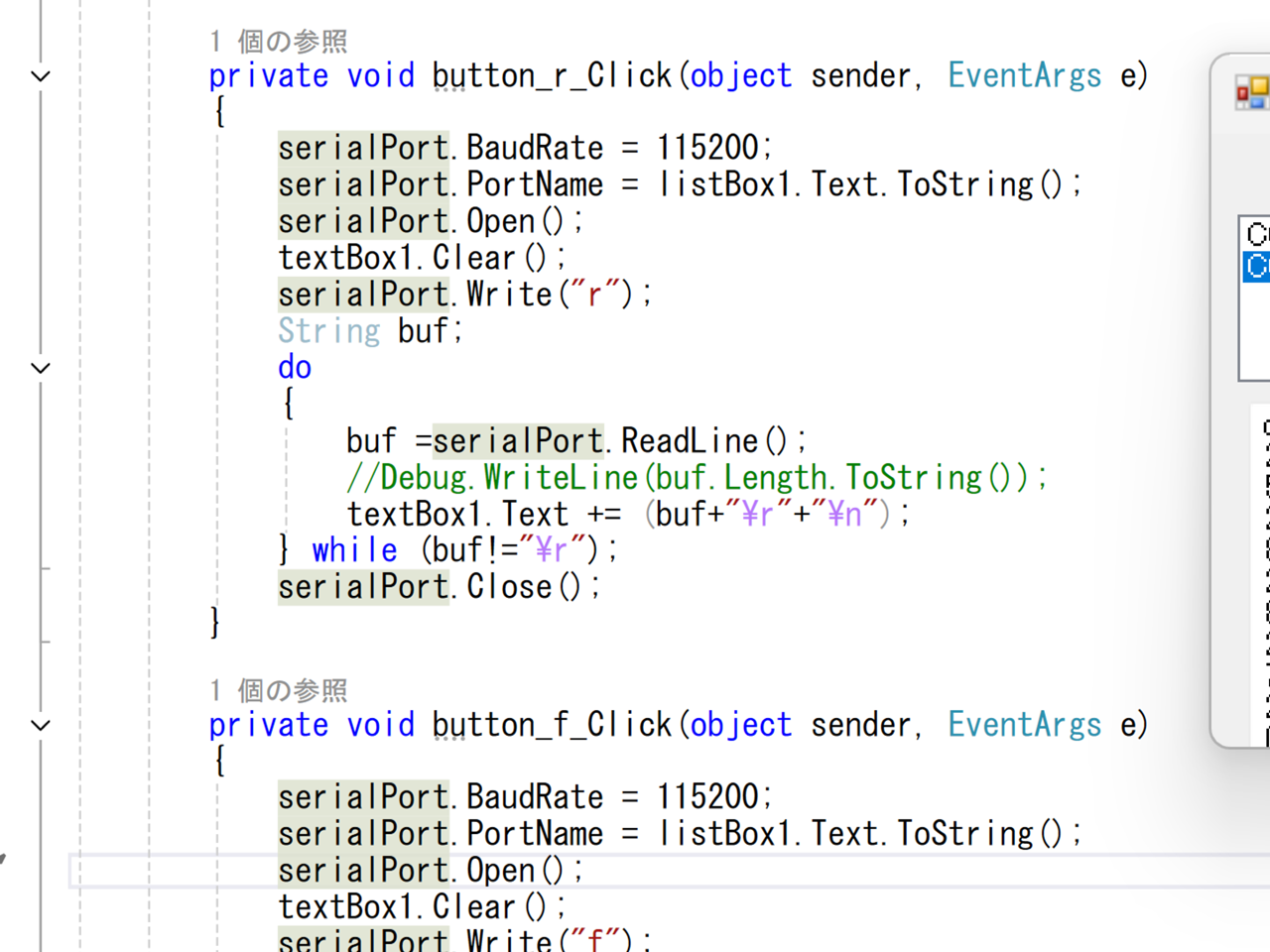
## データの整理 1. PIN_D16にロー、PIN_D17をハイにします。 2. パソコンでデータを吸い上げます。 3. 左が速さで縦が度数の分布グラフを作成しました。 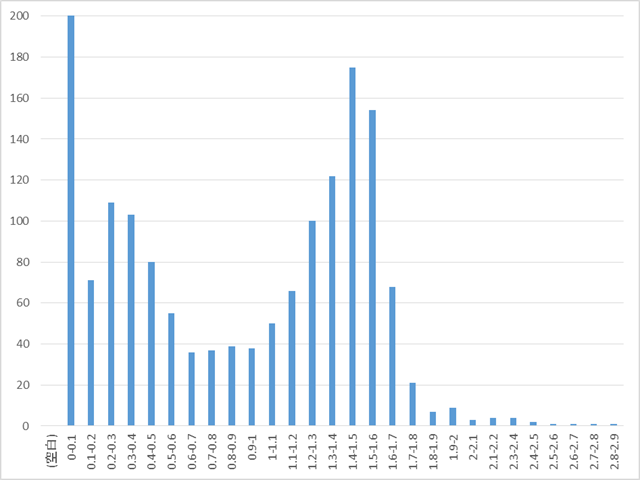 ## 考察 3つ山ができるとは予想外でした。正規分布すると思っていました。 # 実験2 1. 3Dプリンタで固定具を印刷して、減速機などを固定します。 2. 横棒の上にSPRESENSEなどを中心から15cm位の場所に固定します。
3. PIN_D16にハイ電圧、PIN_D17を浮かすはセーフ?(プルダウンの設定をしていたら?)
4. 表示が変わったら減速機に任意に電圧をかけます。今回は0.50Vかけました。 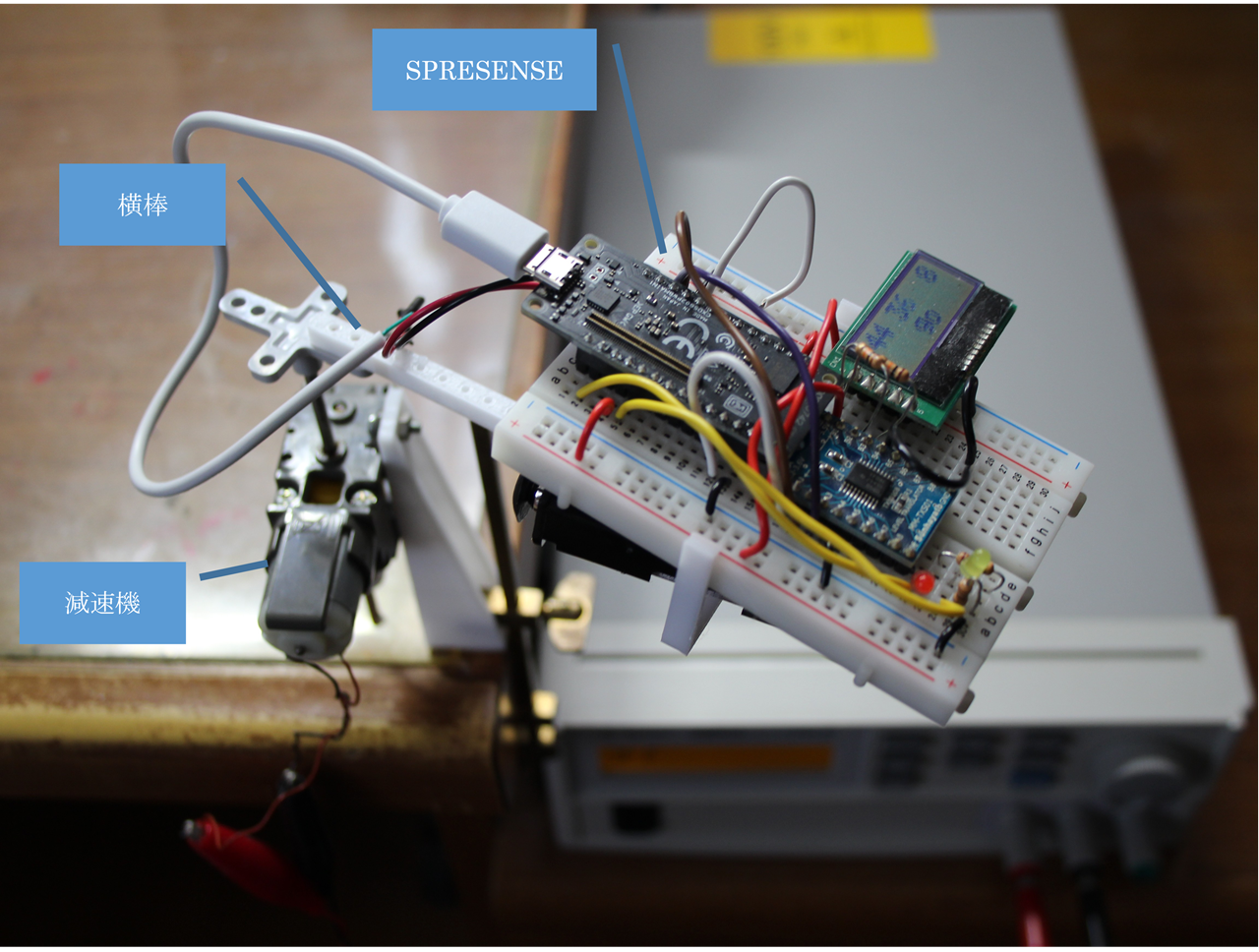
4. 表示が変わったら減速機に任意に電圧をかけます。始動時は少し高めの電圧かけて、今回は0.25Vまで下げてみました。
## データの整理 1. PIN_D16にロー、PIN_D17をハイにします。 2. パソコンでデータを吸い上げます。
 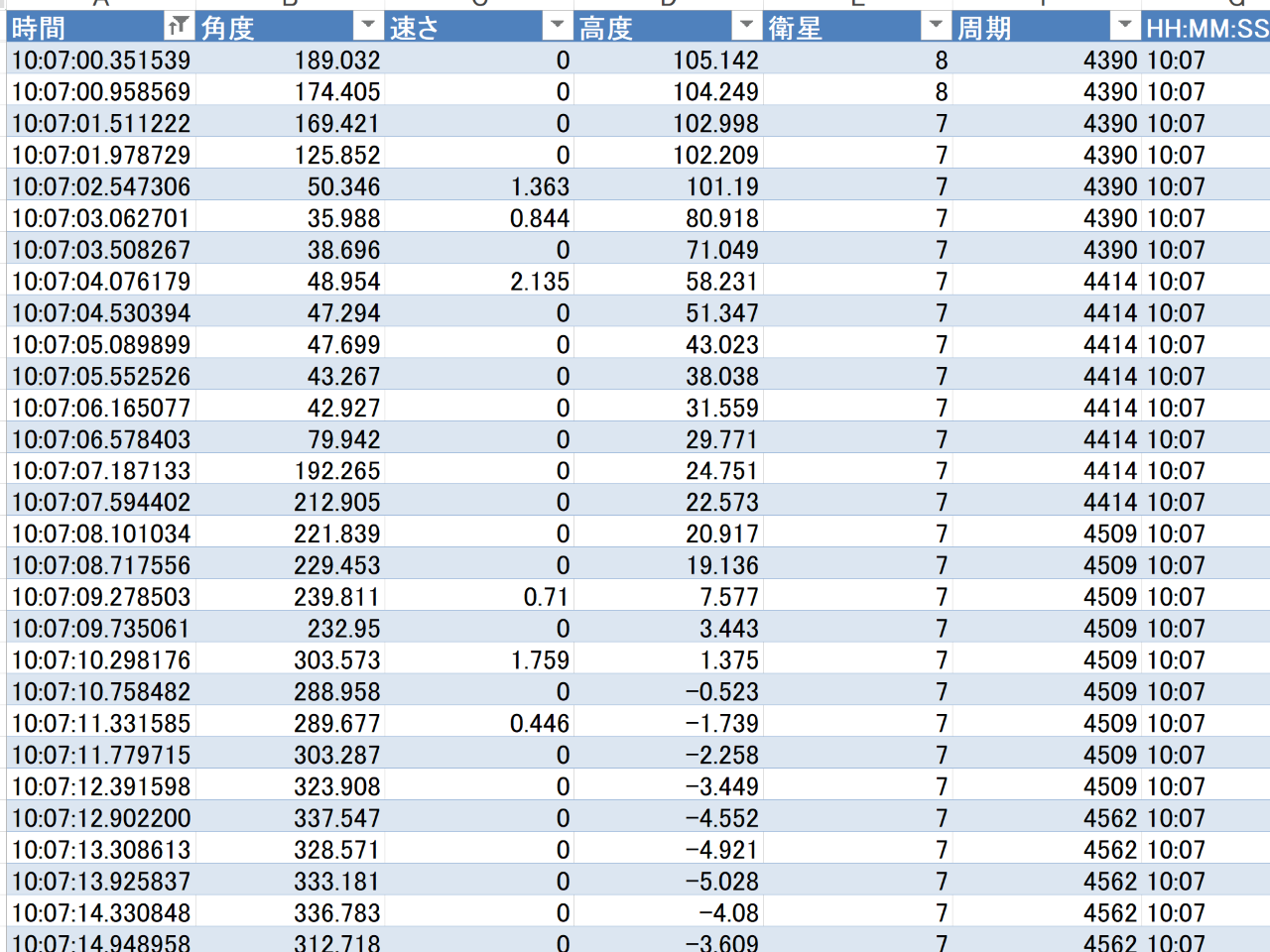
3. グラフ化します。青が角度で左軸。赤が速さで右の軸です。 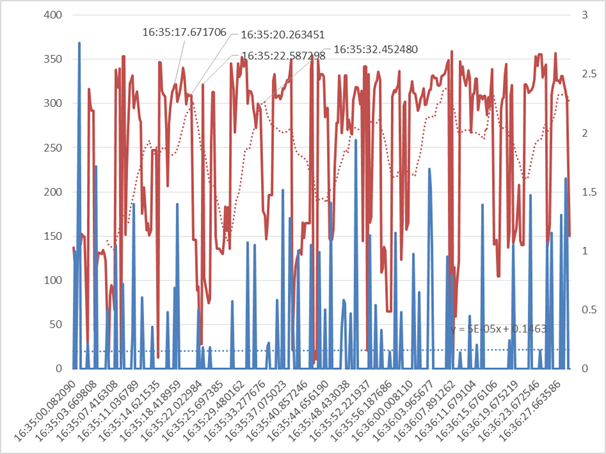
3. 速さの分布図を作成してみました。 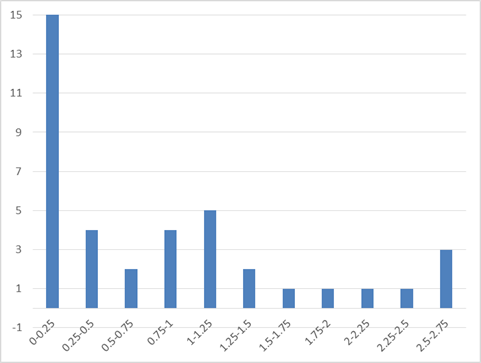
4. 思い切って0を消したグラフを作成します。 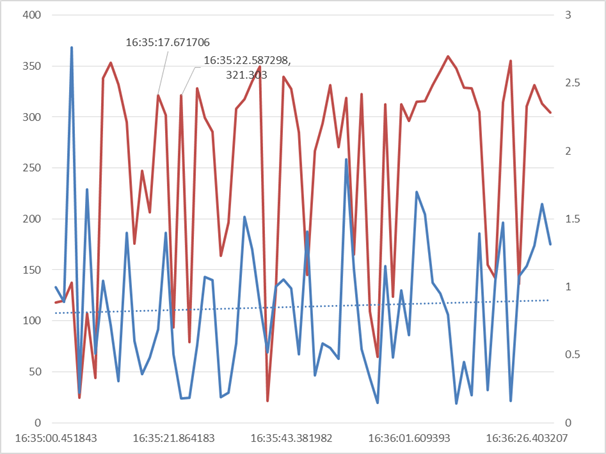
4. 時間のグラフを作成します。 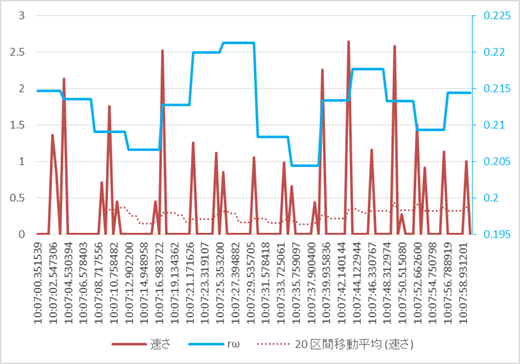
## 考察
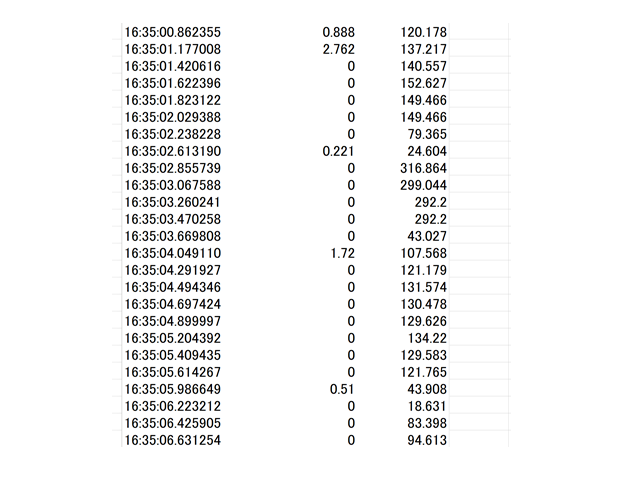
1. 青が速度で左の軸。橙が角度で右の軸です。300度越えから300度越えで16:35:17と16:35:22の5rpsとして。vは青線を線形近似した破線の0.8m/sにしよう。 $$v= 0.5[m/s]$$
1. グラフや表を整理していくと。
$$r=0.15 [m]$$
$$\omega={\theta/t}=2\pi/5=1.256$$ $$r\omega=0.15{\times}1.256=0.18$$ 2. うーん。0m/sありだと。0.14m/s。角度をみていると等速円運動に見えないのはなぜだろう。sin波みたくなると思ったのだけど。ナイキシスト周波数っていうのも考えないとダメなのかな。 `Gnss.setInterval(SpInterval_10Hz);`の位置はあっているのだろうか。アドオンボートが必要なのだろうか? 3. 実験回数が少ないです。
$$\omega={\theta/t}=2\pi/4.5=1.4$$ $$r\omega=0.15{\times}1.4=0.21$$ 2. うーん。0m/sを消してみると。 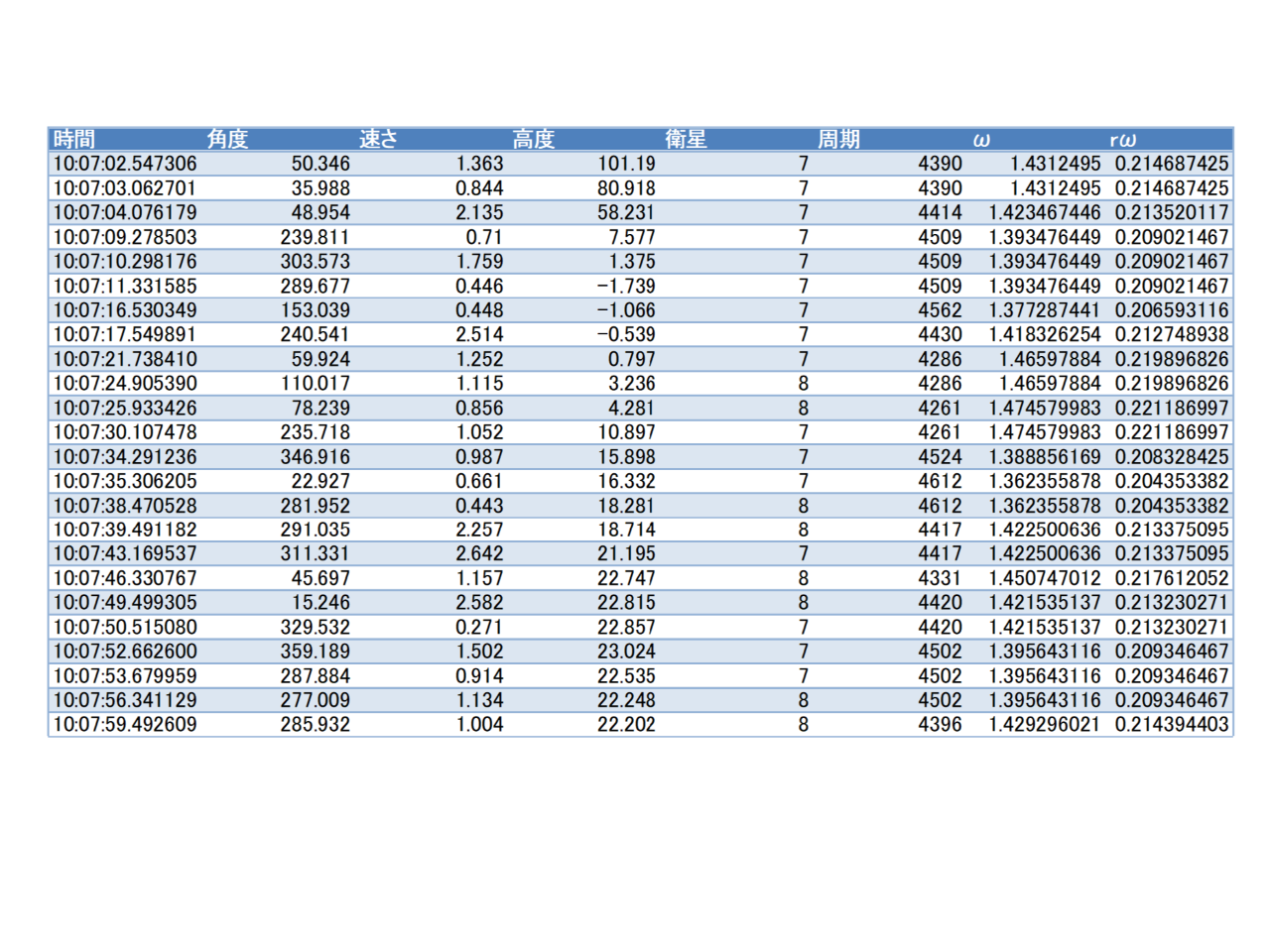 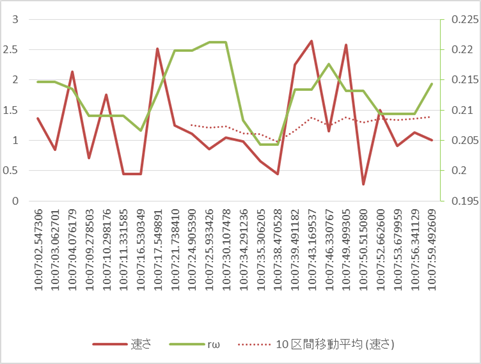 3. うーん。近いような。電圧変えてどうなるだろう。 `Gnss.setInterval(SpInterval_10Hz);`を変えるとどうなるかな。
# 参考 [https://elchika.com/promotion/spresense2024/library/#nav](https://elchika.com/promotion/spresense2024/library/#nav) [https://developer.sony.com/spresense/development-guides/arduino_developer_guide_ja.html#_signalprocessing_%E3%83%A9%E3%82%A4%E3%83%96%E3%83%A9%E3%83%AA](https://developer.sony.com/spresense/development-guides/arduino_developer_guide_ja.html#_signalprocessing_%E3%83%A9%E3%82%A4%E3%83%96%E3%83%A9%E3%83%AA)