TentoBug が 2025年01月12日13時07分12秒 に編集
モータで回転
本文の変更
# はじめに SPRESENSEに、どのような機能があるかを確認しながら、何かをしようと思い始めました。2日目で挫折しそうになったで、文字化することにしました。当面の目標は、大昔に勉強しました。 等速円運動の大きさ $v =r \omega$ 加速度の大きさ $a =r \omega^2$ 向心力 $F =\frac{mv^2}{r}$


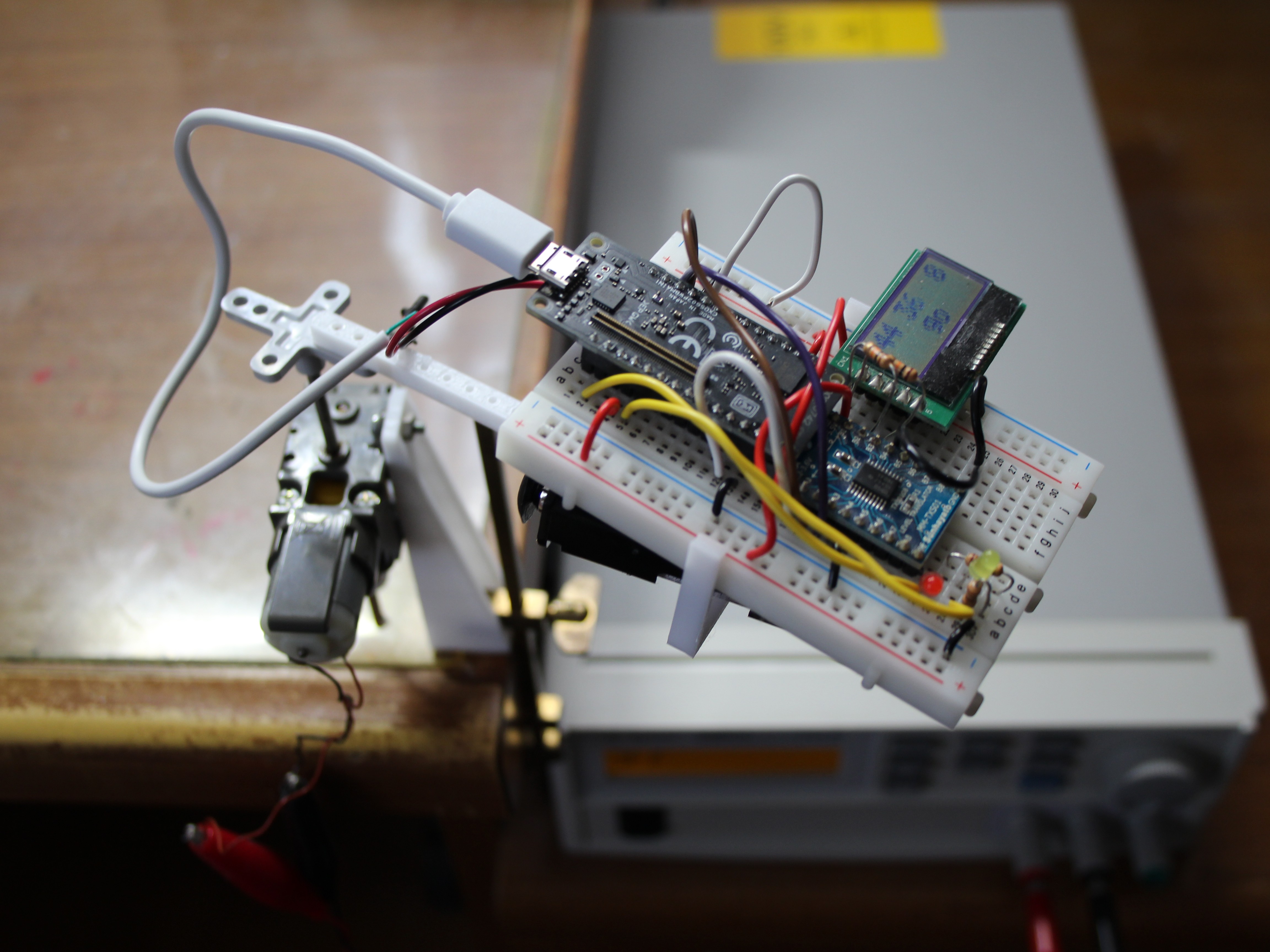
という具合に袋にSPRESENSEを入れて回したら、なんか見えるのかなと予想しています。 # 部品 || 部品 | 備考(敬称略) | |:---:|:---:|:---:| |U1、U3| SPRESENSE | | |U2| MM-TXS01 | サンハヤト | |U4| AE-AQM0802 | 秋月電子通商 | |D1| LED(赤) | | |D2| LED(黄) | |
|| 減速機 | タミヤ | || 安定化電源 | |
# 設計図 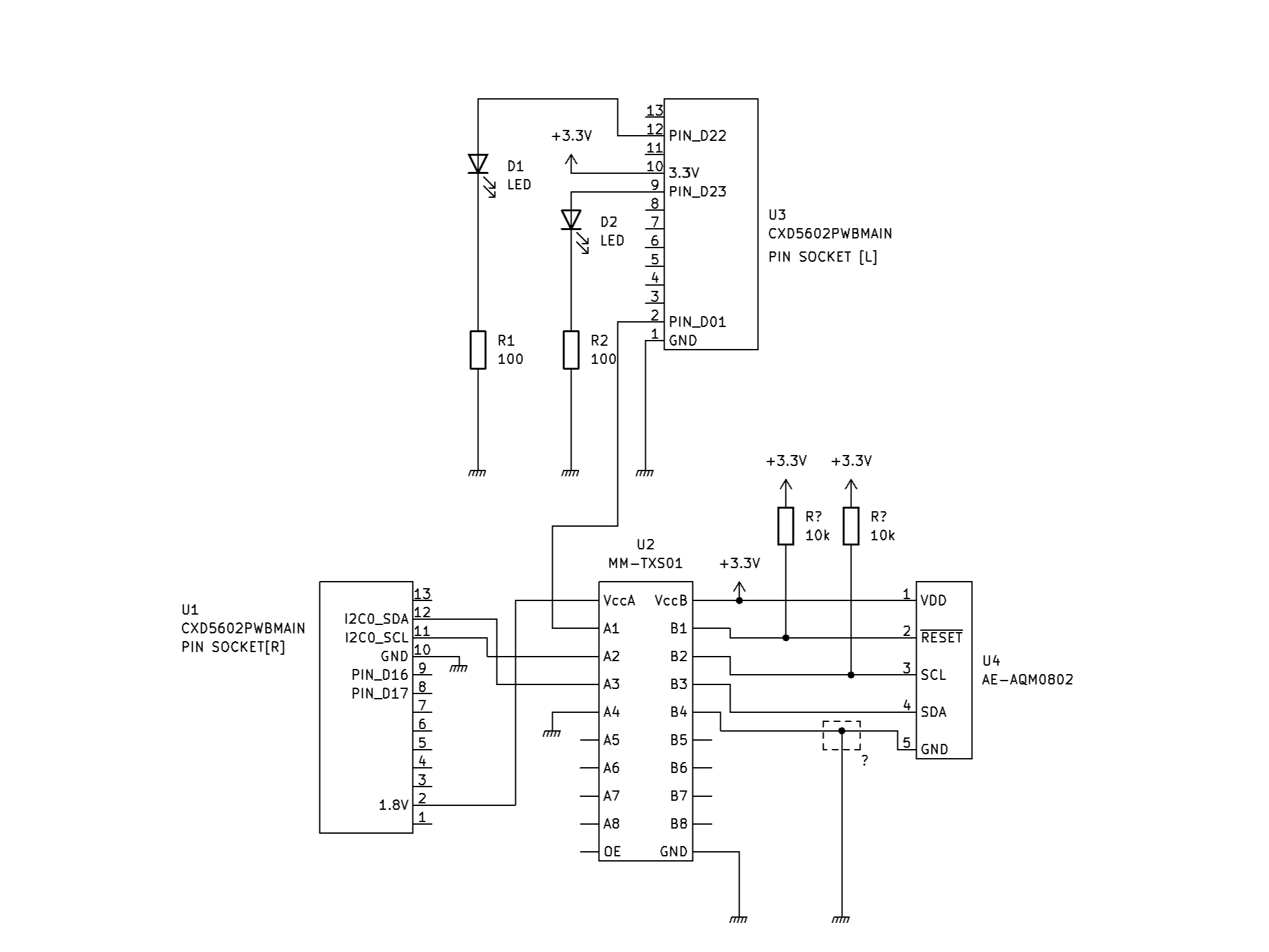  ```arduino:実験中 #include <time.h> #include <FFT.h> #include <GNSS.h> #include <Wire.h>/* I2C*/ #include <Flash.h> #include <File.h> #define STRING_BUFFER_SIZE 128 /**< %Buffer size */ static SpGnss Gnss; /**< SpGnss object */ int duty=0; File FlashFile; unsigned int warikomi(void){ digitalWrite(PIN_D22, HIGH); delayMicroseconds(duty); digitalWrite(PIN_D22, LOW); delayMicroseconds(500-duty); return 500; } void lcdClear(){ char command[]={0x38,0x01}; Wire.beginTransmission(0x3E); Wire.write(command,2); Wire.endTransmission(); delay(200); } void lcd1(char* StringBuffer){ Wire.beginTransmission(0x3E); Wire.write(0x00); Wire.write(0x80); Wire.endTransmission(); delay(1); Wire.beginTransmission(0x3E); Wire.write(0x40); Wire.write(StringBuffer,8); Wire.endTransmission(); delay(1); } void lcd2(char* StringBuffer){ Wire.beginTransmission(0x3E); Wire.write(0x00); Wire.write(0x80+0x40); Wire.endTransmission(); delay(1); Wire.beginTransmission(0x3E); Wire.write(0x40); Wire.write(StringBuffer,7); Wire.endTransmission(); delay(1); } void setup() { char StringBuffer[STRING_BUFFER_SIZE]; /* ポートの設定 */ pinMode(PIN_D02, OUTPUT); pinMode(PIN_D22, OUTPUT); pinMode(PIN_D23, OUTPUT); pinMode(PIN_D16, INPUT_PULLDOWN); pinMode(PIN_D17, INPUT_PULLDOWN); /* シリアル通信設定 */ Serial.begin(115200); sleep(3); attachTimerInterrupt(warikomi,500);//us /*LCDモジュール初期化*/ int i=0; char command[]={0x38,0x39,0x14,0x70,0x56,0x6C,0x38,0x0C,0x01}; digitalWrite(PIN_D02, LOW); delay(200); digitalWrite(PIN_D02, HIGH); Wire.begin(); delay(200); Wire.beginTransmission(0x3E); Wire.write(command,9); Wire.endTransmission(); delay(200); snprintf(StringBuffer, STRING_BUFFER_SIZE, "setup "); lcd1(StringBuffer); /* Set serial baudrate. */ Serial.begin(115200); /* Set Debug mode to Info */ Gnss.setDebugMode(PrintInfo); int result; /* Activate GNSS device */ result = Gnss.begin();
Gnss.select(GPS);
Gnss.select(QZ_L1S); Gnss.select(QZ_L1CA);
Gnss.select(GPS);
Gnss.setInterval(SpInterval_10Hz); /* Start positioning */ result = Gnss.start(COLD_START); } static void print_0(SpNavData *pNavData) { char StringBuffer[STRING_BUFFER_SIZE]; struct tm now; int e=0; /* 日本時間の設定 日付?*/ now.tm_year =pNavData->time.year; now.tm_mon =pNavData->time.month; now.tm_mday =pNavData->time.day; now.tm_hour =pNavData->time.hour+9; now.tm_min =pNavData->time.minute; now.tm_sec =pNavData->time.sec; //mktime(&now); snprintf(StringBuffer, STRING_BUFFER_SIZE, "%02d:%02d:%02d,%f,%3.3f,%d", now.tm_hour,// pNavData->time.minute, pNavData->time.sec, pNavData->direction, pNavData->velocity, //速さ duty ); Serial.print(StringBuffer); Serial.println(""); /* LCD2行目 */ snprintf(StringBuffer, STRING_BUFFER_SIZE, "%2d %3.2f", pNavData->numSatellites, pNavData->direction); lcd2(StringBuffer); /* LCD1行目 */ snprintf(StringBuffer, STRING_BUFFER_SIZE, "%02d:%02d:%02d", now.tm_hour,// pNavData->time.minute, pNavData->time.sec); lcd1(StringBuffer); } static void print_1(SpNavData *pNavData) { char StringBuffer[STRING_BUFFER_SIZE]; struct tm now; int e=0; /* 日本時間の設定 日付?*/ now.tm_year =pNavData->time.year; now.tm_mon =pNavData->time.month; now.tm_mday =pNavData->time.day; now.tm_hour =pNavData->time.hour+9; now.tm_min =pNavData->time.minute; now.tm_sec =pNavData->time.sec; snprintf(StringBuffer, STRING_BUFFER_SIZE, "%02d %02d %2d", pNavData->time.minute, pNavData->time.sec, pNavData->numSatellites ); /* LCD1行目 */ lcd1(StringBuffer); if (pNavData->posDataExist == 1){
snprintf(StringBuffer, STRING_BUFFER_SIZE, "%02d:%02d:%02d.%06ld,%6f,%6f,%3.3f,%3.3f,%d",
snprintf(StringBuffer, STRING_BUFFER_SIZE, "%02d:%02d:%02d.%06ld,%6f,%6f,%3.3f,%3.3f,%3.3f,%d",
now.tm_hour,// pNavData->time.minute, pNavData->time.sec, pNavData->time.usec, pNavData->latitude, pNavData->longitude, pNavData->direction,//角度 pNavData->velocity, //速さ
pNavData->altitude,
pNavData->numSatellites//衛星 ); Serial.print(StringBuffer); Serial.println(""); //Flash.begin(); File f=Flash.open("shimako/data.csv",FILE_WRITE); f.println(StringBuffer); f.close(); /* LCD2行目 */ snprintf(StringBuffer, STRING_BUFFER_SIZE, " go "); lcd2(StringBuffer); }else{ snprintf(StringBuffer, STRING_BUFFER_SIZE, "wait...."); lcd2(StringBuffer); } } /* ファイルの読み込んで送信 */ void r() { lcdClear(); lcd1("r "); FlashFile = Flash.open("shimako/data.csv"); if (FlashFile) { Serial.println("data.csv"); while (FlashFile.available()) { Serial.write(FlashFile.read()); } Serial.print("\r\n"); //受け側による。タイムアウト・・・。 FlashFile.close(); } else { /* ファイルがない時 */ Serial.println("error"); } } /* ? */ void d(){ lcdClear(); lcd1("d "); Serial.println("filepath"); String filepath; Flash.exists(filepath); Serial.println(filepath); } /* 初期化 */ void f(){ lcdClear(); lcd1("f "); Serial.println("format"); Flash.format(); Flash.mkdir("shimako/"); Serial.println("good"); } int ad=0; int hugo=1; SpNavData NavData; void loop() { int sw=digitalRead(PIN_D16)+2*digitalRead(PIN_D17); if(duty>499){ hugo=-1; }else{ if(duty<1)hugo=1; } //メニュー switch (sw){ case 0: Gnss.getNavData(&NavData); print_0(&NavData); break; case 1: if(Gnss.isUpdate()==1){ Gnss.getNavData(&NavData); print_1(&NavData); } break; case 2: unsigned int SelialCom; //lcdClear(); lcd1("r f d "); lcd2(" "); SelialCom=Serial.read(); switch(SelialCom){ case 'r': r(); break; case 'f': f(); break; case 'd': d(); break; } break; } } ``` # 考察 1. I2Cをプルアップへ
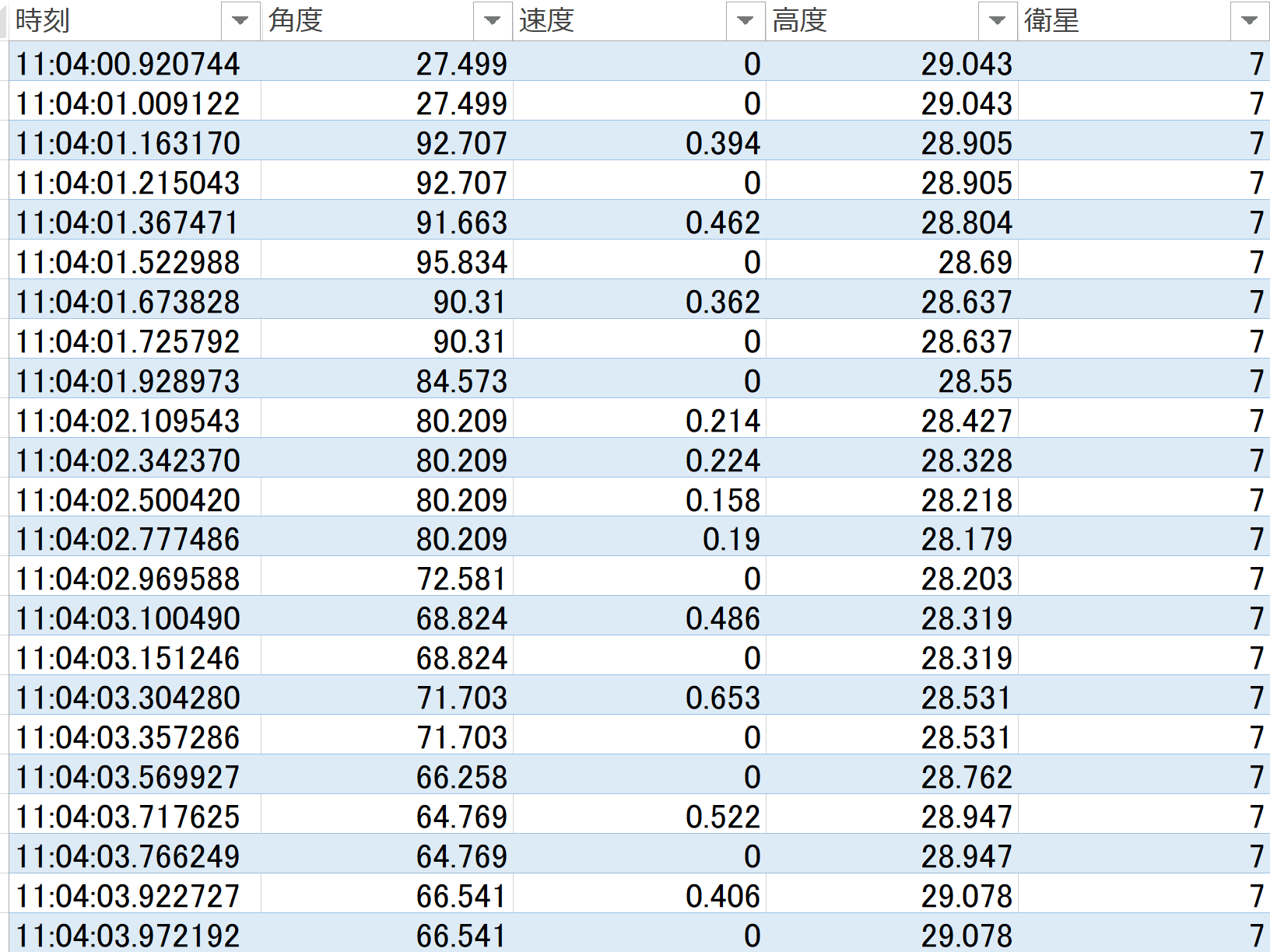
3. LEDが変化していないな・・・。 3. SPRESENSEを鞄に入れてグルグル回した結果です。0というのが、なぜだろう。rが小さいのかな。r=50mとかでカゴにSPRESENSEをおいて自転車に乗って回ったらいいのかな。土地がないな。
3. LEDが変化していないな・・・。 3. SPRESENSEをグルグル回した結果です。0というのが、なぜだろう。rが小さいのかな。r=50mとかでカゴにSPRESENSEをおいて自転車に乗って回ったらいいのかな。土地がないな。
4. 計測だけでは、なんかあれだな。嬉しさ・・・・。
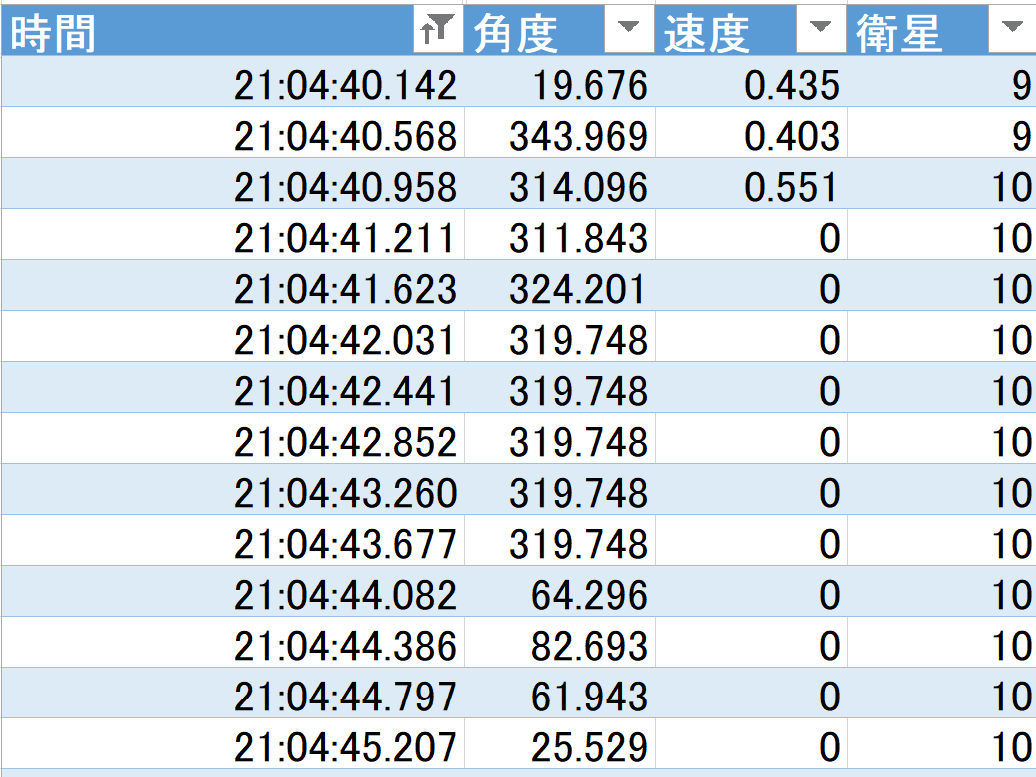 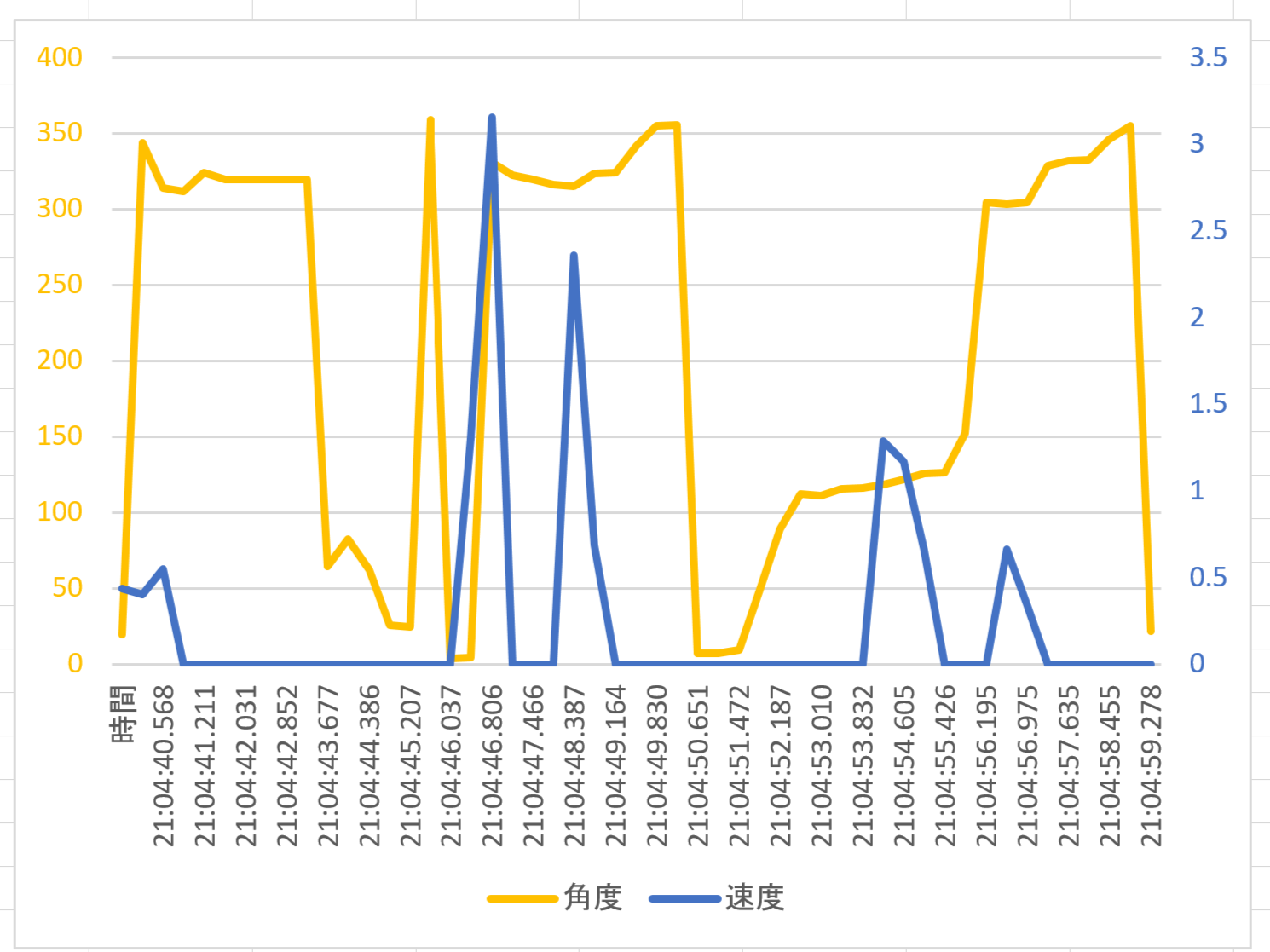
5. とりあえず。r=10cm位で実験した生データに近いものを秒単位の平均に集計している場面。4分10秒から5分00秒が回転しているところです。うーん。
# 参考 [https://elchika.com/promotion/spresense2024/library/#nav](https://elchika.com/promotion/spresense2024/library/#nav) [https://developer.sony.com/spresense/development-guides/arduino_developer_guide_ja.html#_signalprocessing_%E3%83%A9%E3%82%A4%E3%83%96%E3%83%A9%E3%83%AA](https://developer.sony.com/spresense/development-guides/arduino_developer_guide_ja.html#_signalprocessing_%E3%83%A9%E3%82%A4%E3%83%96%E3%83%A9%E3%83%AA)