toshibox が 2021年02月18日23時04分07秒 に編集
他キットで代用する際の参考情報を追記。
本文の変更
**1 はじめに** 私は画像処理に興味があり、またかわいいペットのような物を作ってみたいと思い、顔を認識して追従するローバー を製作しました。 **2 使用したもの** ハードウェア ・Raspberry Pi 3 Model B ・Raspberry Pi 用 カメラモジュールケース付き ・モバイルバッテリー ・ビュートローバー H8(ヴィストン株式会社)  ソフトウェア ・Raspbian ・OpenCV(画像処理ライブラリ ) **3 システム概要** **3-1 システムイメージ図と実際の写真** 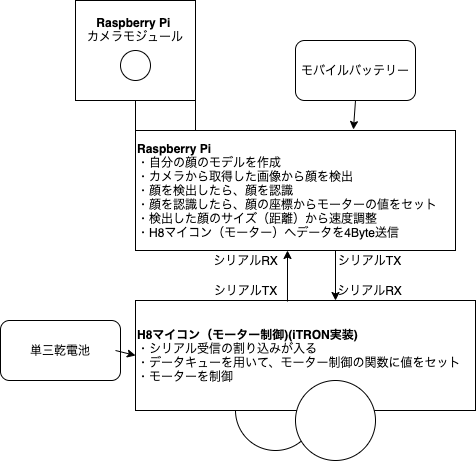 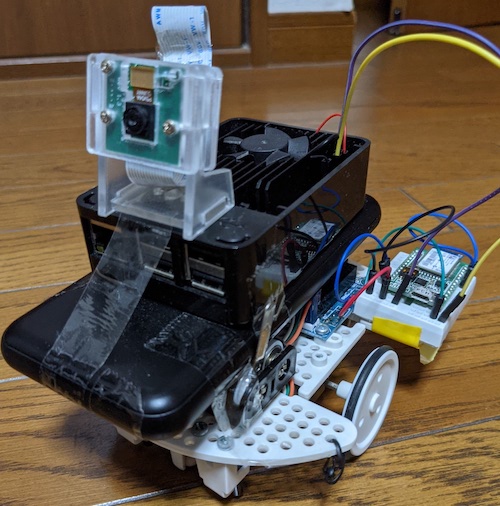 **3-2 動作説明** ①顔写真から顔認識用のモデルを生成。 ②カメラから画像を取得 ③顔分類器(OpenCV公開のもの)で顔を検出 ④顔を検出したら、①のモデルを用いて顔認識 ⑤顔認識結果で該当の顔と判定された場合、その顔の座標を元にモーターの制御値を決定。 ⑥モーター制御値等のデータをH8マイコンにシリアル送信。 ⑦H8マイコンは受信したデータを元にモーター制御し、受信データをRaspberry Piへ返す。 ⑧最後に、認識結果を載せた画像を表示する。 ※プライバシー保護のため顔を塗りつぶしています。 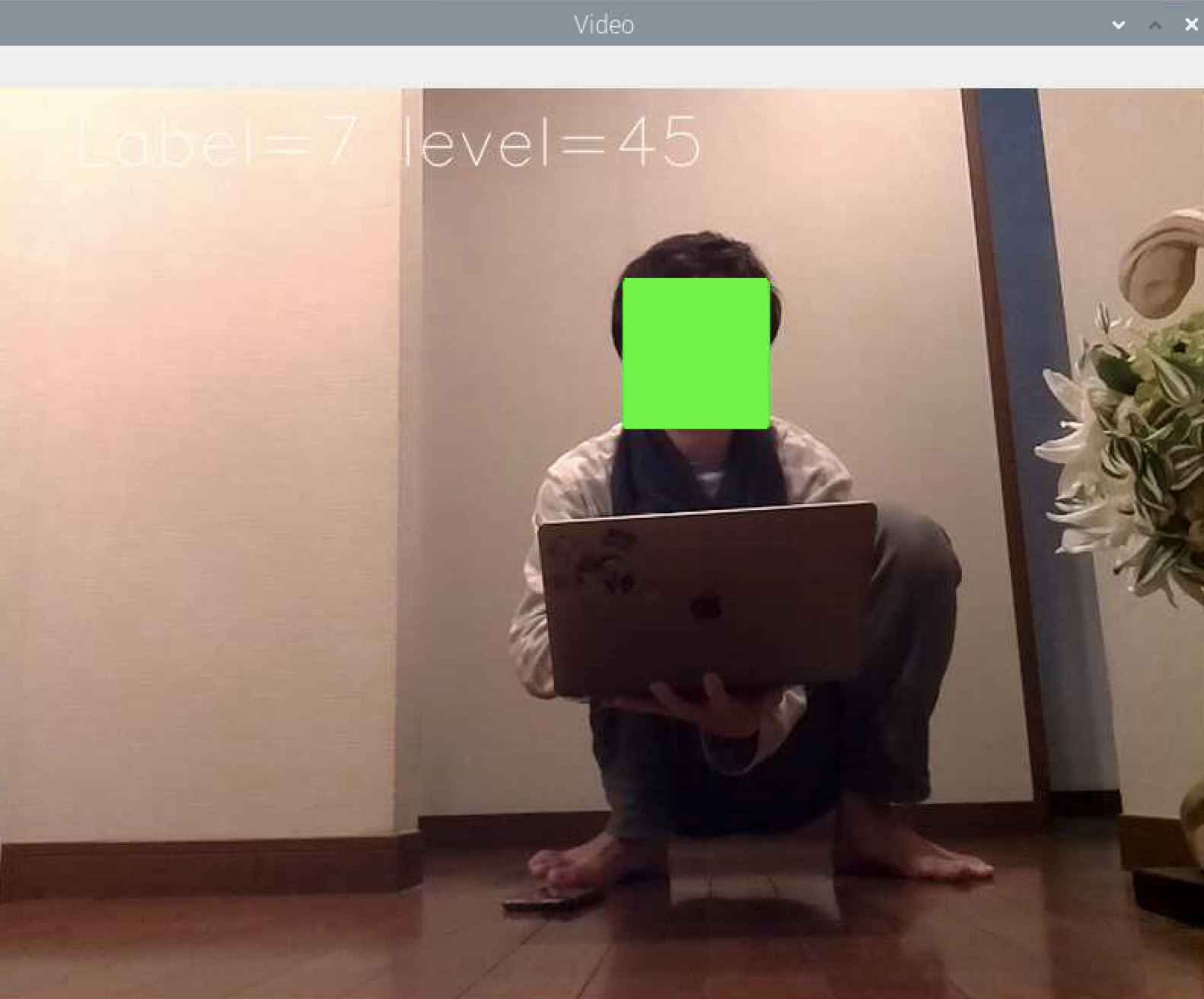 **4 実際の動き** 動画があります、これを見てください! https://twitter.com/tdk_tsk_mcz/status/1362033759738945543?s=19 **5 おまけ**
ソース
本稿では、H8マイコンを搭載したビュートローバー でモーターを制御している。 H8マイコンのモーター制御は、左右それぞれ-127〜128までの値を設定する。 そのため、Raspberry Pi からH8マイコンへは、左右のモーター値を送信している。 ビュートローバーの代わりに市販でよく出回っているArduinoなどのモーターキットを使用する場合、上記モーター値を使用するキットに適した値に変更して、シリアル接続したら代用できます。 ソース↓
https://github.com/toshibox/Face-Trace-Rover