n-shinichi が 2023年05月05日06時51分03秒 に編集
コメント無し
本文の変更
以前製作したマイクロロボのOLEDディスプレイ版です。 先回のロボは顔は手書きでしたが今回はOLEDディスプレイに したので顔の表情を変えることができるようになりました。 先回のマイクロロボ 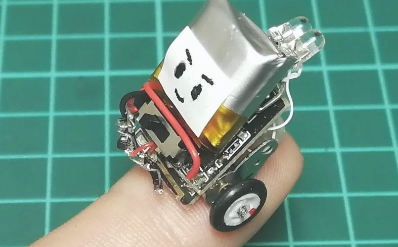 写真ではわかりにくいですが先回より小型化を図りました。 20mm角に収まりました。 モータの配線にはΦ0.1mm線を使用しています。 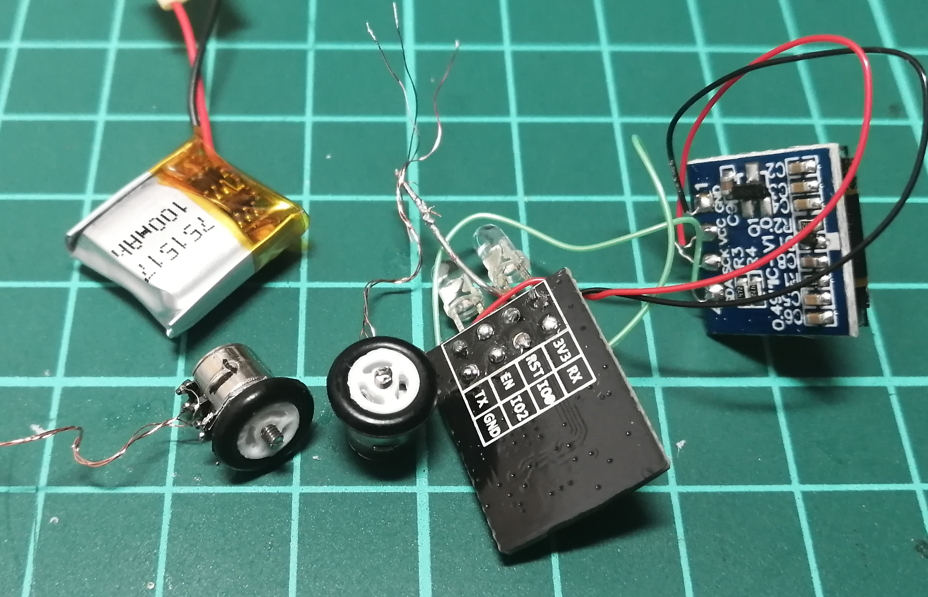 小さいながらもWiFini接続することができ WEBサーバーにもなります。 バイポーラステッピングモーターをスター結線して、 電源にLEDを使って負荷連動中性点を作り、 自然に回転電流、磁界ベクトルが一定の大きさになりやすい 工夫をしています。 それをブラシレスモータ同様の動かし方にて3レベルインバータ駆動しています。 モーターの駆動テスト動画です https://twitter.com/shinichi_nin/status/1652527308299968513 小型化に対しての工夫としては出力が小さいので モータドライバは使用せず、マイコンのポートで直接駆動しています。 スマホからの無線操縦の構成は スマホ ⇐BLE⇒ M5StickC ⇐ESPNOW⇒ ESP-01 M5StickCが中継機になっています。 ロボの動作テスト動画です。 https://twitter.com/shinichi_nin/status/1653778650653954048 興味のある方は詳しい説明はこちらなど参照してください。
https://blog.hatena.ne.jp/n_shinichi/n-shinichi.hatenablog.com/
https://n-shinichi.hatenablog.com/?_ga=2.3202032.1931858196.1683116815-124876159.1618931563