mametarou963 が 2021年02月24日23時46分09秒 に編集
コメント無し
メイン画像の変更
本文の変更
# 背景 社内の共用男子トイレ(小)の足元が汚れていることが多いです。 トイレにはよく見かける「一歩前へ ご協力をお願いします」のシールが貼られるようになりましたが、大きな改善は見られませんでした。公共のトイレもこのような話は少なくないと思います。 シールが貼られているにもかかわらず、なぜ汚くなるのかという議論の中で、以下のような結論になりました。 各人は、「トイレと距離が離れているな」と思ったら、「 一歩前には出るのですが、前の出方には個人差があり」あるいは「もう十分につめているから問題と考え」、トイレをこぼさない絶対距離までは詰めれていないかもしれない。 そこで男子トイレ(小)前に手軽におけて、絶対距離が離れている場合は、一歩前へ促し、 トイレをこぼさない絶対位置まで、前進を促すものをつくろうと考えました。 # 仕様 * 人(物体)がいない場合には何も表示されない
* 人(物体)がいるが、12cm(体感このくらい距離が詰めれていれば良いかなという距離です)より離れている場合は「一歩マエ」(赤色)を出して、一歩前に進むことを促す
* 人(物体)がいるが、12cm(体感このくらい距離が詰めれていれば良いかなという距離です)より離れている場合は「イッポ→マエヘ」(赤色)を出して、一歩前に進むことを促す
* 人(物体)がいて、12cm以内に入っていれば「OK!」(青色)を出す。トイレをしてもらってよい # 部品 * M5StickC x 4 * M5Stack用ToF測距センサユニット * M5StickC NeoFlash Hat 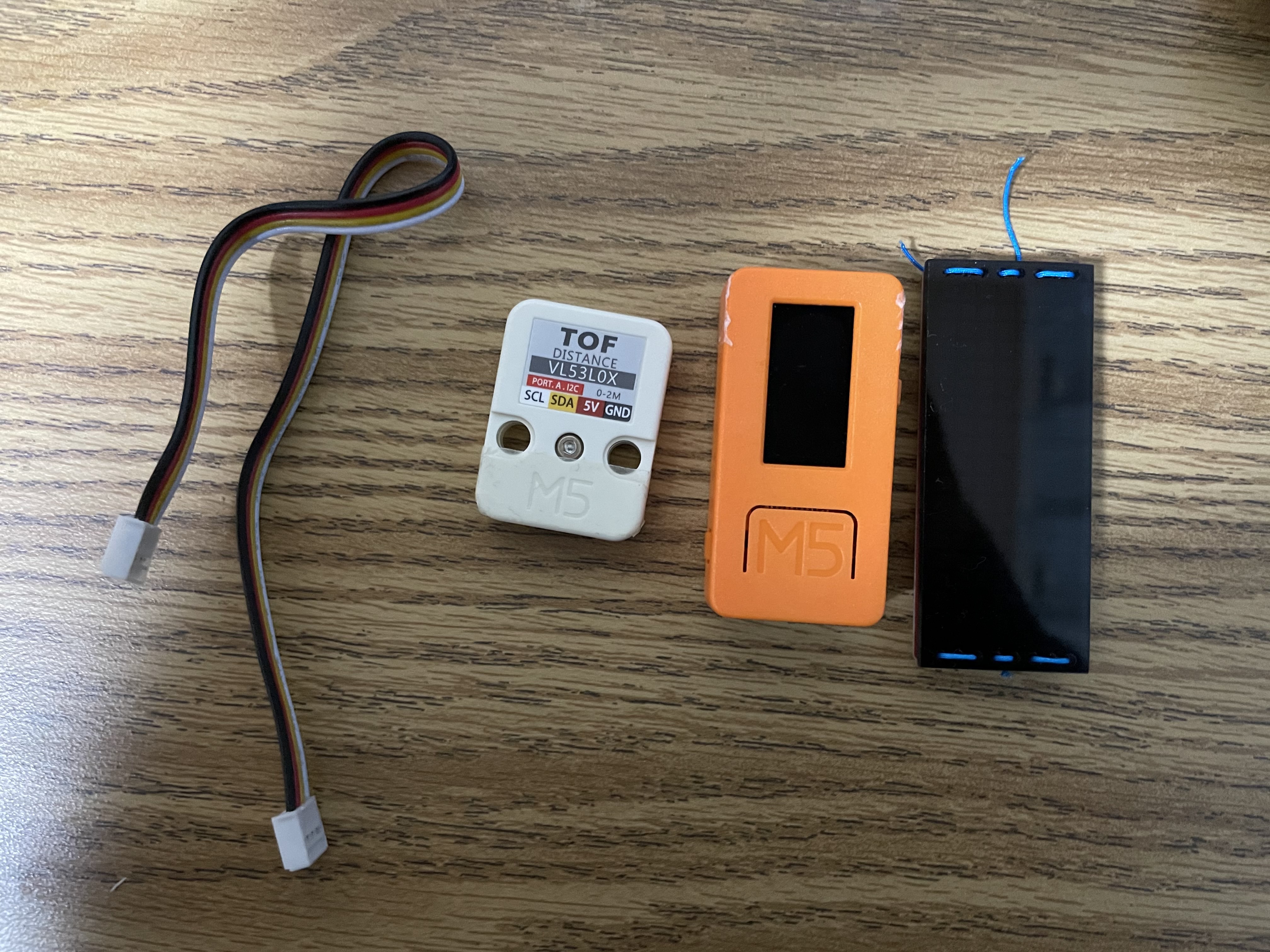 # 接続図 各モジュールを接続した図を示します 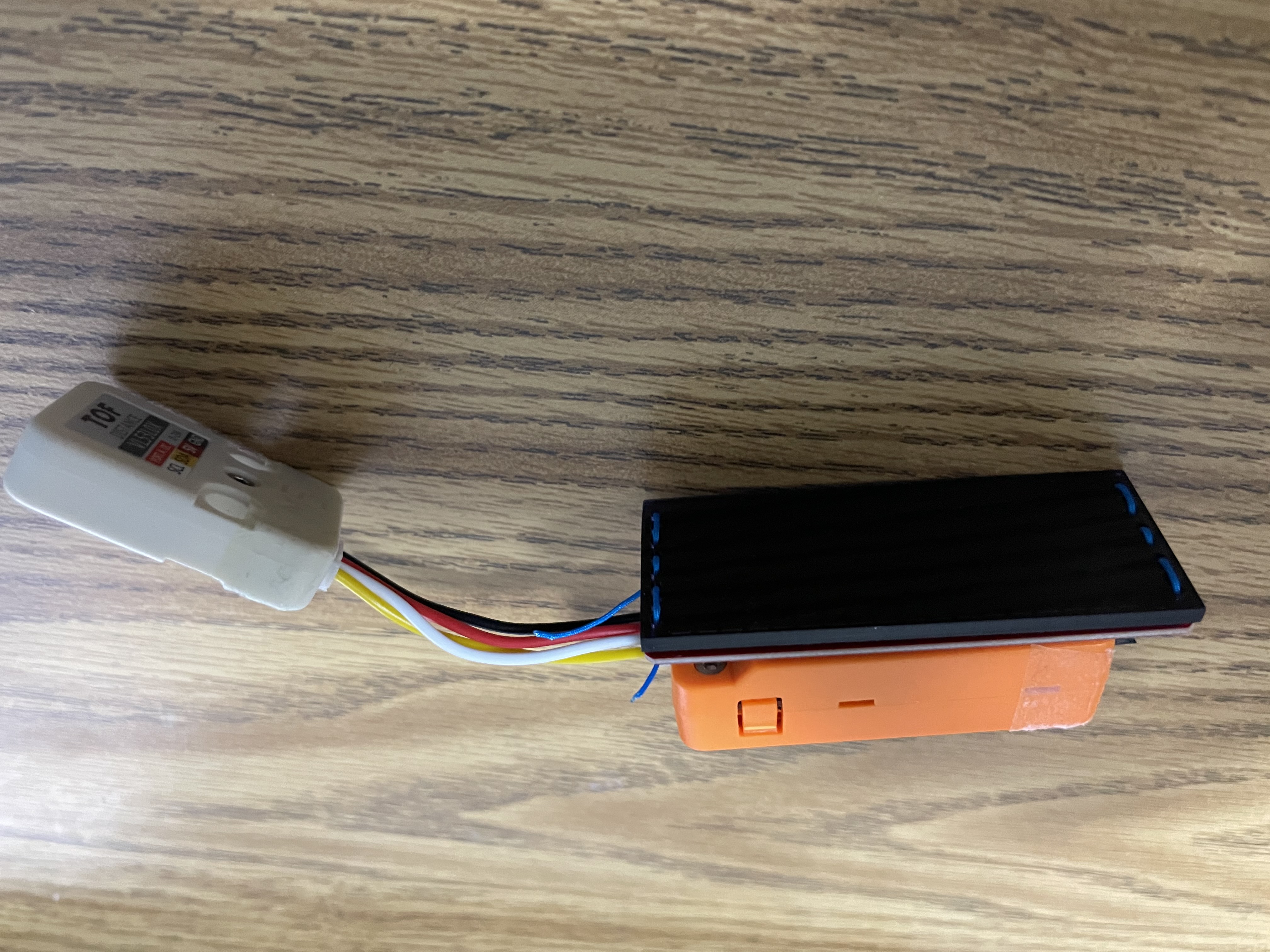 # 動作の様子 公共の男子トイレ(小)は動画化は難しかったため、紙で代用しています。
@[youtube](https://www.youtube.com/watch?v=BVZeGDIQnck&feature=youtu.be)
@[youtube](https://www.youtube.com/watch?v=iw3z_C0P5FU&feature=youtu.be)
twitterにも投稿し、この時点では「一歩マエ」の表示でした。
@[twitter](https://twitter.com/mame_tarou/status/1364523632895037442)
しかし、読みにくいから「イッポ→マエヘ」はどうか?というアイデアをいただいたので反映させていただきました。 @[twitter](https://twitter.com/fumi38g/status/1364563689429327875) @[twitter](https://twitter.com/mame_tarou/status/1364577265531580418)
* 少し距離が離れている場合
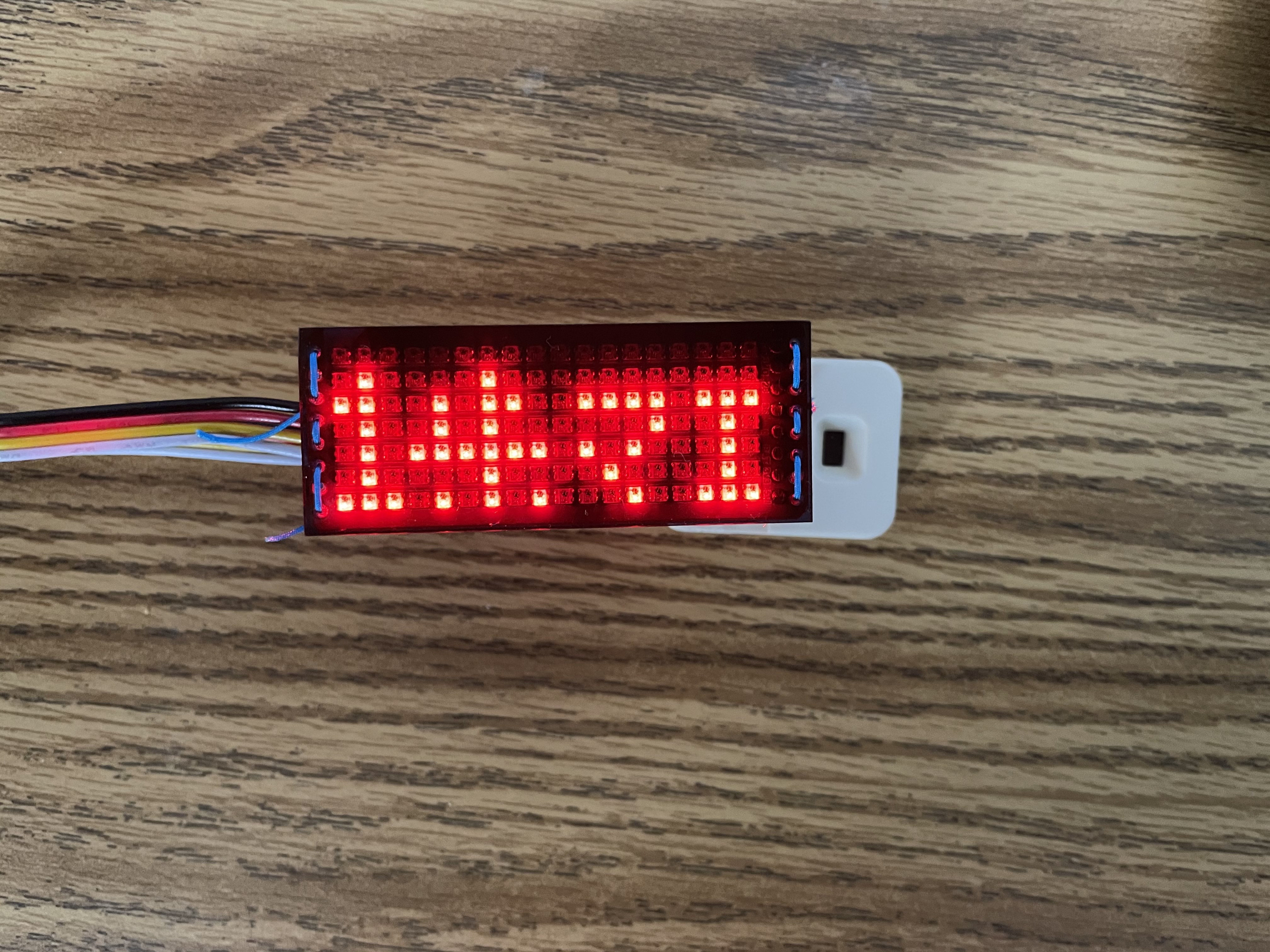
イッポ→マエヘが交互に出ます。
 
* 適切な距離になっている場合 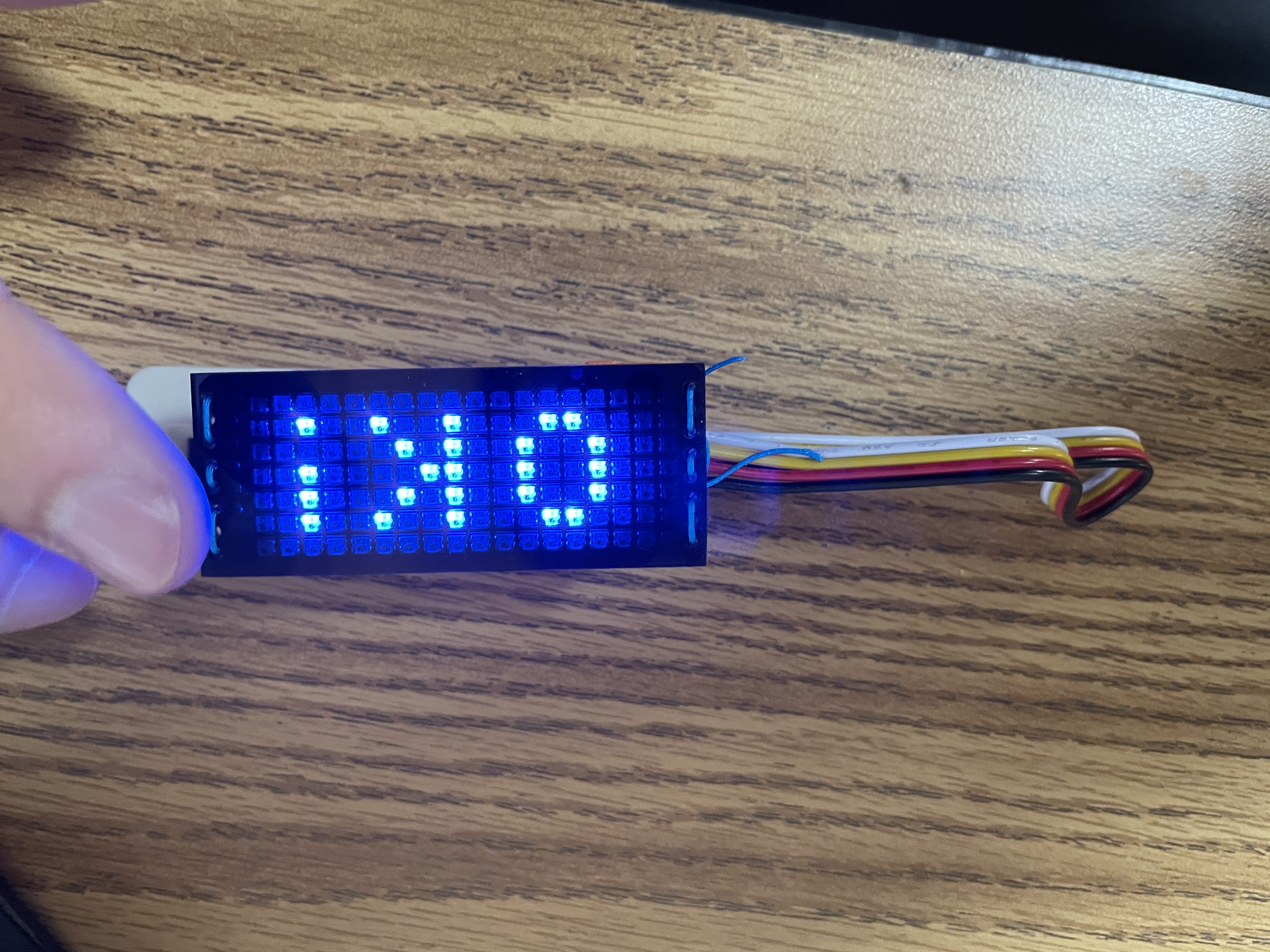 # プログラム ```arduino:M5StickCのプログラム
#include <M5StickC.h> #include "FastLED.h" #include <Wire.h> // flash light FASTLED_USING_NAMESPACE // FastLED "100-lines-of-code" demo reel, showing just a few // of the kinds of animation patterns you can quickly and easily // compose using FastLED. // // This example also shows one easy way to define multiple // animations patterns and have them automatically rotate. // // -Mark Kriegsman, December 2014 #if defined(FASTLED_VERSION) && (FASTLED_VERSION < 3001000) #warning "Requires FastLED 3.1 or later; check github for latest code." #endif #define DATA_PIN 26 //#define CLK_PIN 4 #define LED_TYPE WS2811 #define COLOR_ORDER GRB #define NUM_LEDS 126 CRGB leds[NUM_LEDS]; #define BRIGHTNESS 30 #define FRAMES_PER_SECOND 120 // -- The core to run FastLED.show() #define FASTLED_SHOW_CORE 0 // tof #define VL53L0X_REG_IDENTIFICATION_MODEL_ID 0xc0 #define VL53L0X_REG_IDENTIFICATION_REVISION_ID 0xc2 #define VL53L0X_REG_PRE_RANGE_CONFIG_VCSEL_PERIOD 0x50 #define VL53L0X_REG_FINAL_RANGE_CONFIG_VCSEL_PERIOD 0x70 #define VL53L0X_REG_SYSRANGE_START 0x00 #define VL53L0X_REG_RESULT_INTERRUPT_STATUS 0x13 #define VL53L0X_REG_RESULT_RANGE_STATUS 0x14 #define address 0x29 byte gbuf[16]; void setup() { M5.begin(); delay(3000); // 3 second delay for recovery Serial.begin(115200); M5.Lcd.setRotation(3); M5.Lcd.fillScreen(BLACK); M5.Lcd.setTextSize(2); M5.Lcd.setCursor(10, 0); M5.Lcd.setTextColor(TFT_LIGHTGREY); M5.Lcd.print("NeoFlash HAT\r\n"); M5.Lcd.setCursor(60, 30); M5.Lcd.setTextColor(TFT_NAVY); M5.Lcd.print("RGB"); M5.Lcd.setCursor(30, 50); M5.Lcd.print("EFFICTION"); // FlashLED // tell FastLED about the LED strip configuration FastLED.addLeds<LED_TYPE,DATA_PIN,COLOR_ORDER>(leds, NUM_LEDS).setCorrection(TypicalLEDStrip); //FastLED.addLeds<LED_TYPE,DATA_PIN,CLK_PIN,COLOR_ORDER>(leds, NUM_LEDS).setCorrection(TypicalLEDStrip); // set master brightness control FastLED.setBrightness(BRIGHTNESS); // TOF Wire.begin(); // join i2c bus (address optional for master) } void DispArrayReset() { CRGB color = CRGB::Black; int rowMax = 7; int columeMax = 18; int indexColume = 0; for(int i = 0;i < rowMax * columeMax;i++){ leds[i] = color; } }
void DispIppoMae(){
void DispIppo(){
CRGB color = CRGB::Red; int rowMax = 7; int columeMax = 18; int indexColume = 0; DispArrayReset(); // 2行目 indexColume = 1;
leds[1 + indexColume * columeMax] = color; leds[6 + indexColume * columeMax] = color;
leds[4 + indexColume * columeMax] = color; leds[17 + indexColume * columeMax] = color;
// 3行目 indexColume = 2;
leds[2 + indexColume * columeMax] = color; leds[3 + indexColume * columeMax] = color; leds[15 + indexColume * columeMax] = color; // 4行目 indexColume = 3;
leds[0 + indexColume * columeMax] = color; leds[1 + indexColume * columeMax] = color;
leds[4 + indexColume * columeMax] = color;
leds[2 + indexColume * columeMax] = color;
leds[6 + indexColume * columeMax] = color;
leds[7 + indexColume * columeMax] = color; leds[10 + indexColume * columeMax] = color; leds[11 + indexColume * columeMax] = color; leds[12 + indexColume * columeMax] = color;
leds[8 + indexColume * columeMax] = color;
leds[13 + indexColume * columeMax] = color;
leds[14 + indexColume * columeMax] = color;
leds[15 + indexColume * columeMax] = color; leds[16 + indexColume * columeMax] = color; leds[17 + indexColume * columeMax] = color;
// 5行目 indexColume = 4; leds[2 + indexColume * columeMax] = color; leds[6 + indexColume * columeMax] = color; leds[10 + indexColume * columeMax] = color; leds[15 + indexColume * columeMax] = color; // 6行目 indexColume = 5; leds[2 + indexColume * columeMax] = color; leds[9 + indexColume * columeMax] = color; leds[13 + indexColume * columeMax] = color; leds[15 + indexColume * columeMax] = color; leds[17 + indexColume * columeMax] = color; // 7行目 indexColume = 6; leds[2 + indexColume * columeMax] = color; leds[7 + indexColume * columeMax] = color; leds[8 + indexColume * columeMax] = color; leds[13 + indexColume * columeMax] = color; leds[15 + indexColume * columeMax] = color; leds[17 + indexColume * columeMax] = color; FastLED.show(); } void DispMaehe(){ CRGB color = CRGB::Red; int rowMax = 7; int columeMax = 18; int indexColume = 0; DispArrayReset(); // 3行目 indexColume = 2; leds[0 + indexColume * columeMax] = color; leds[1 + indexColume * columeMax] = color; leds[2 + indexColume * columeMax] = color; leds[3 + indexColume * columeMax] = color; leds[4 + indexColume * columeMax] = color; leds[7 + indexColume * columeMax] = color; leds[8 + indexColume * columeMax] = color; leds[9 + indexColume * columeMax] = color; leds[14 + indexColume * columeMax] = color; leds[15 + indexColume * columeMax] = color;
// 4行目 indexColume = 3;
leds[1 + indexColume * columeMax] = color;
leds[4 + indexColume * columeMax] = color;
leds[6 + indexColume * columeMax] = color;
leds[8 + indexColume * columeMax] = color;
leds[13 + indexColume * columeMax] = color;
leds[14 + indexColume * columeMax] = color; leds[15 + indexColume * columeMax] = color;
leds[16 + indexColume * columeMax] = color; // 5行目 indexColume = 4; leds[1 + indexColume * columeMax] = color; leds[3 + indexColume * columeMax] = color;
leds[4 + indexColume * columeMax] = color; leds[5 + indexColume * columeMax] = color; leds[6 + indexColume * columeMax] = color; leds[7 + indexColume * columeMax] = color;
leds[8 + indexColume * columeMax] = color;
leds[10 + indexColume * columeMax] = color; leds[12 + indexColume * columeMax] = color;
leds[13 + indexColume * columeMax] = color;
leds[16 + indexColume * columeMax] = color; // 6行目 indexColume = 5;
leds[1 + indexColume * columeMax] = color; leds[6 + indexColume * columeMax] = color; leds[11 + indexColume * columeMax] = color;
leds[2 + indexColume * columeMax] = color; leds[8 + indexColume * columeMax] = color;
leds[16 + indexColume * columeMax] = color;
leds[17 + indexColume * columeMax] = color;
// 7行目 indexColume = 6;
leds[0 + indexColume * columeMax] = color; leds[1 + indexColume * columeMax] = color; leds[2 + indexColume * columeMax] = color; leds[4 + indexColume * columeMax] = color;
leds[3 + indexColume * columeMax] = color;
leds[6 + indexColume * columeMax] = color;
leds[7 + indexColume * columeMax] = color;
leds[8 + indexColume * columeMax] = color;
leds[12 + indexColume * columeMax] = color; leds[15 + indexColume * columeMax] = color; leds[16 + indexColume * columeMax] = color;
leds[9 + indexColume * columeMax] = color; leds[10 + indexColume * columeMax] = color;
leds[17 + indexColume * columeMax] = color; FastLED.show(); }
void DispOk(){ CRGB color = CRGB::Blue; int rowMax = 7; int columeMax = 18; int indexColume = 0; DispArrayReset(); // 2行目 indexColume = 1; leds[4 + indexColume * columeMax] = color; leds[5 + indexColume * columeMax] = color; leds[9 + indexColume * columeMax] = color; leds[12 + indexColume * columeMax] = color; leds[15 + indexColume * columeMax] = color; // 3行目 indexColume = 2; leds[3 + indexColume * columeMax] = color; leds[6 + indexColume * columeMax] = color; leds[9 + indexColume * columeMax] = color; leds[11 + indexColume * columeMax] = color; leds[15 + indexColume * columeMax] = color; // 4行目 indexColume = 3; leds[3 + indexColume * columeMax] = color; leds[6 + indexColume * columeMax] = color; leds[9 + indexColume * columeMax] = color; leds[10 + indexColume * columeMax] = color; leds[15 + indexColume * columeMax] = color; // 5行目 indexColume = 4; leds[3 + indexColume * columeMax] = color; leds[6 + indexColume * columeMax] = color; leds[9 + indexColume * columeMax] = color; leds[11 + indexColume * columeMax] = color; // 6行目 indexColume = 5; leds[4 + indexColume * columeMax] = color; leds[5 + indexColume * columeMax] = color; leds[9 + indexColume * columeMax] = color; leds[12 + indexColume * columeMax] = color; leds[15 + indexColume * columeMax] = color; // 7行目 FastLED.show(); } void DispReset() { DispArrayReset(); FastLED.show(); } int dist = 0; bool okChattering = false;
int ippoMaeCounter = 0;
void loop(){ M5.update(); dist = getDist(); if((dist <= 20 )||(dist > 1000)){ DispReset(); okChattering = false; }else if(dist < 125){ if(okChattering) DispOk(); else okChattering = true; }else{
DispIppoMae();
okChattering = false;
ippoMaeCounter++; if(((ippoMaeCounter >> 2) % 2) == 0){ DispIppo(); }else{ DispMaehe(); }
} delay(1000); } int getDist() { byte val1 = read_byte_data_at(VL53L0X_REG_IDENTIFICATION_REVISION_ID); Serial.print("Revision ID: "); Serial.println(val1); val1 = read_byte_data_at(VL53L0X_REG_IDENTIFICATION_MODEL_ID); Serial.print("Device ID: "); Serial.println(val1); val1 = read_byte_data_at(VL53L0X_REG_PRE_RANGE_CONFIG_VCSEL_PERIOD); Serial.print("PRE_RANGE_CONFIG_VCSEL_PERIOD="); Serial.println(val1); Serial.print(" decode: "); Serial.println(VL53L0X_decode_vcsel_period(val1)); val1 = read_byte_data_at(VL53L0X_REG_FINAL_RANGE_CONFIG_VCSEL_PERIOD); Serial.print("FINAL_RANGE_CONFIG_VCSEL_PERIOD="); Serial.println(val1); Serial.print(" decode: "); Serial.println(VL53L0X_decode_vcsel_period(val1)); write_byte_data_at(VL53L0X_REG_SYSRANGE_START, 0x01); byte val = 0; int cnt = 0; while (cnt < 100) { // 1 second waiting time max delay(10); val = read_byte_data_at(VL53L0X_REG_RESULT_RANGE_STATUS); if (val & 0x01) break; cnt++; } if (val & 0x01) Serial.println("ready"); else Serial.println("not ready"); read_block_data_at(0x14, 12); uint16_t acnt = makeuint16(gbuf[7], gbuf[6]); uint16_t scnt = makeuint16(gbuf[9], gbuf[8]); uint16_t dist = makeuint16(gbuf[11], gbuf[10]); byte DeviceRangeStatusInternal = ((gbuf[0] & 0x78) >> 3); Serial.print("ambient count: "); Serial.println(acnt); Serial.print("signal count: "); Serial.println(scnt); Serial.print("distance "); Serial.println(dist); Serial.print("status: "); Serial.println(DeviceRangeStatusInternal); M5.Lcd.setCursor(0, 70); M5.Lcd.fillScreen(BLACK); M5.Lcd.print( dist); return dist; } uint16_t bswap(byte b[]) { // Big Endian unsigned short to little endian unsigned short uint16_t val = ((b[0] << 8) & b[1]); return val; } uint16_t makeuint16(int lsb, int msb) { return ((msb & 0xFF) << 8) | (lsb & 0xFF); } void write_byte_data(byte data) { Wire.beginTransmission(address); Wire.write(data); Wire.endTransmission(); } void write_byte_data_at(byte reg, byte data) { // write data word at address and register Wire.beginTransmission(address); Wire.write(reg); Wire.write(data); Wire.endTransmission(); } void write_word_data_at(byte reg, uint16_t data) { // write data word at address and register byte b0 = (data &0xFF); byte b1 = ((data >> 8) && 0xFF); Wire.beginTransmission(address); Wire.write(reg); Wire.write(b0); Wire.write(b1); Wire.endTransmission(); } byte read_byte_data() { Wire.requestFrom(address, 1); while (Wire.available() < 1) delay(1); byte b = Wire.read(); return b; } byte read_byte_data_at(byte reg) { //write_byte_data((byte)0x00); write_byte_data(reg); Wire.requestFrom(address, 1); while (Wire.available() < 1) delay(1); byte b = Wire.read(); return b; } uint16_t read_word_data_at(byte reg) { write_byte_data(reg); Wire.requestFrom(address, 2); while (Wire.available() < 2) delay(1); gbuf[0] = Wire.read(); gbuf[1] = Wire.read(); return bswap(gbuf); } void read_block_data_at(byte reg, int sz) { int i = 0; write_byte_data(reg); Wire.requestFrom(address, sz); for (i=0; i<sz; i++) { while (Wire.available() < 1) delay(1); gbuf[i] = Wire.read(); } } uint16_t VL53L0X_decode_vcsel_period(short vcsel_period_reg) { // Converts the encoded VCSEL period register value into the real // period in PLL clocks uint16_t vcsel_period_pclks = (vcsel_period_reg + 1) << 1; return vcsel_period_pclks; } ```