google_homer が 2021年05月17日22時56分18秒 に編集
コメント無し
本文の変更
# 概要 簡単すぎる4足歩行ロボットです。犬などの多くの4足歩行動物が採用しているトロット歩容という歩き方をさせます。足としてサーボ(+サーボホーン)4台をobniz 1Yに直刺しして、モバイルバッテリーの裏に両面テープで張り付けるだけでできます。プログラムも数学などは使わず、簡単なロジックで実現しました。 # 歩行動画 @[youtube](https://youtu.be/lNPCKF9c-DE) # 歩行モデル 犬など多くの4足歩行動物が行っている、**トロット**という歩き方を採用しました。 1脚当たりサーボ1台の1自由度として構成し、歩容モデルを定義し各サーボの回転絶対角度を求めました。 ==サーボの組付け位置の微妙な違いにより、多少角度調整が必要になることもあります== 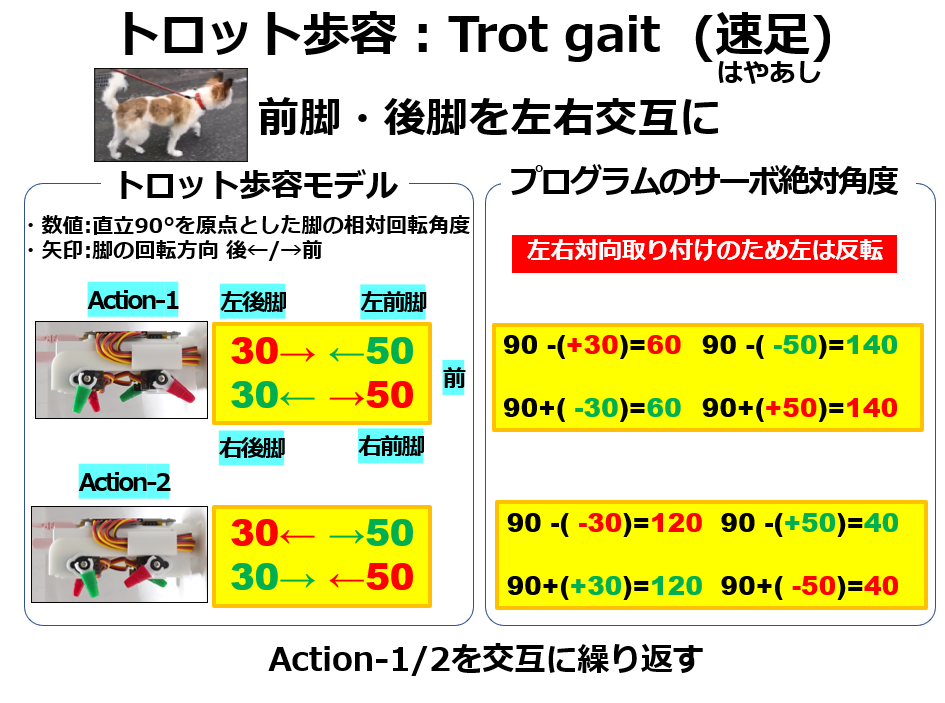 # プログラム 前述の歩行モデルに記載したサーボの絶対角度を設定します。 Action関数内の待ち時間の大小で、歩く速さを調整できます。 プログラム起動直後は直立し、ボタンを押している間歩行します。 ==下記クリックでプログラムがクリアに表示されます== 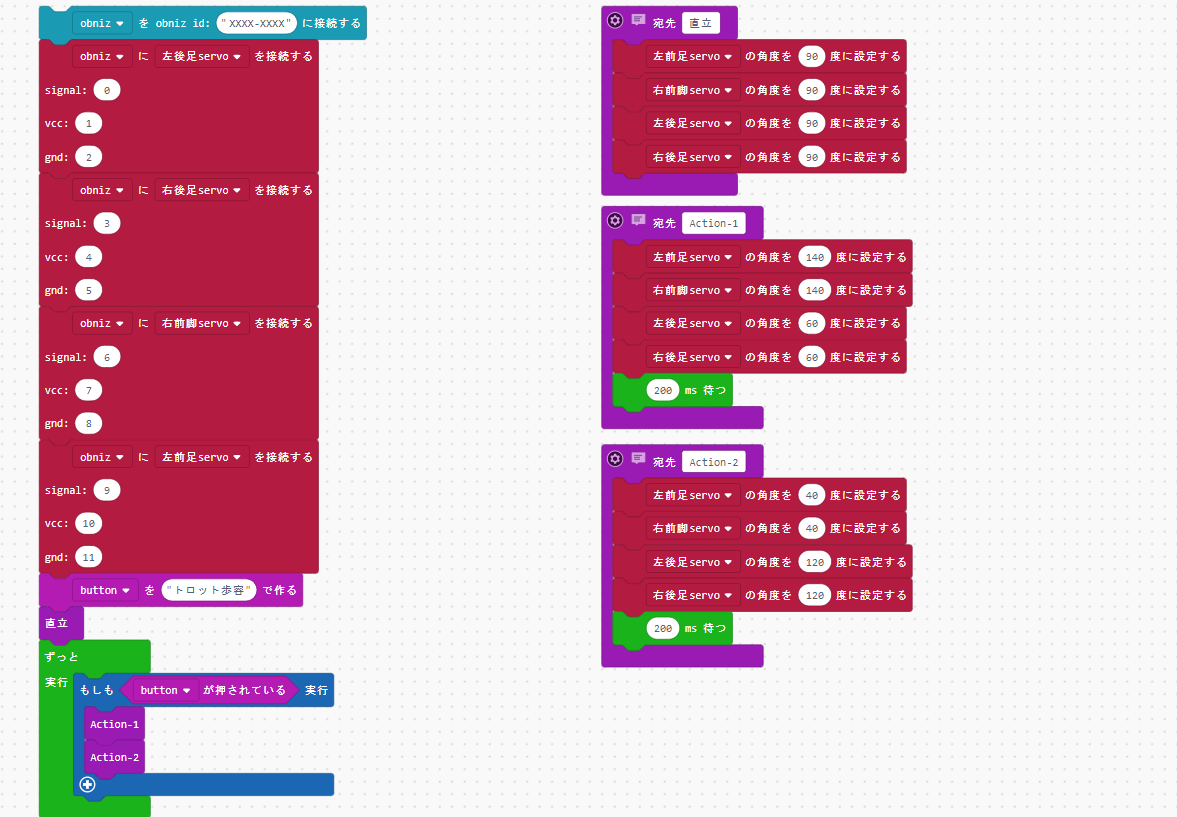 # 部品 | 品名 | 型番 |数量 | 備考 | |:---:|:---|:---|:---| | マイコン | obniz 1Y | 1 || | サーボモータ | MG90S | 4 |付属のサーボホーンを脚として使用| | モバイルバッテリー | CHE-061 | 1 | chero Canvas | | USBケーブル | Type-C 10cm | 1 | DAYSO | | ピンヘッダ | 両端ロング40ピン | 1 | 破断し12ピン使用 | ==サーボはMG90S使用しましたが、より安価で一般的なSG90当たりでも行けるはずです== 他 強力両面テープ少々 ハサミ (両面テープ用) ニッパ (ピンヘッダ破断用)  # 組み立て準備 40連のピンヘッダから12連分を切り取る  サーボモータの片面に両面テープを貼り付け 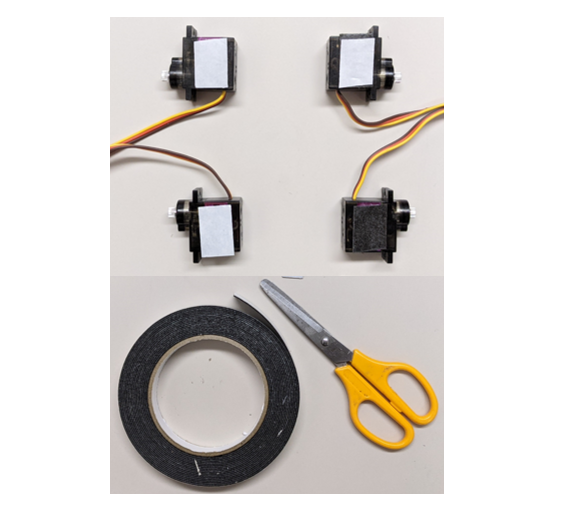 # 組み立て手順 サーボ4台を12連ピンヘッダを介してobnizに接続します。 サーボをモバイルバッテリーの裏に両面テープで貼り付けます。 ケーブルの取り廻しなどは、下記動画を参照して下さい。 ==サーボホーン(脚)は、後述のキャリブレーションで取り付けます== 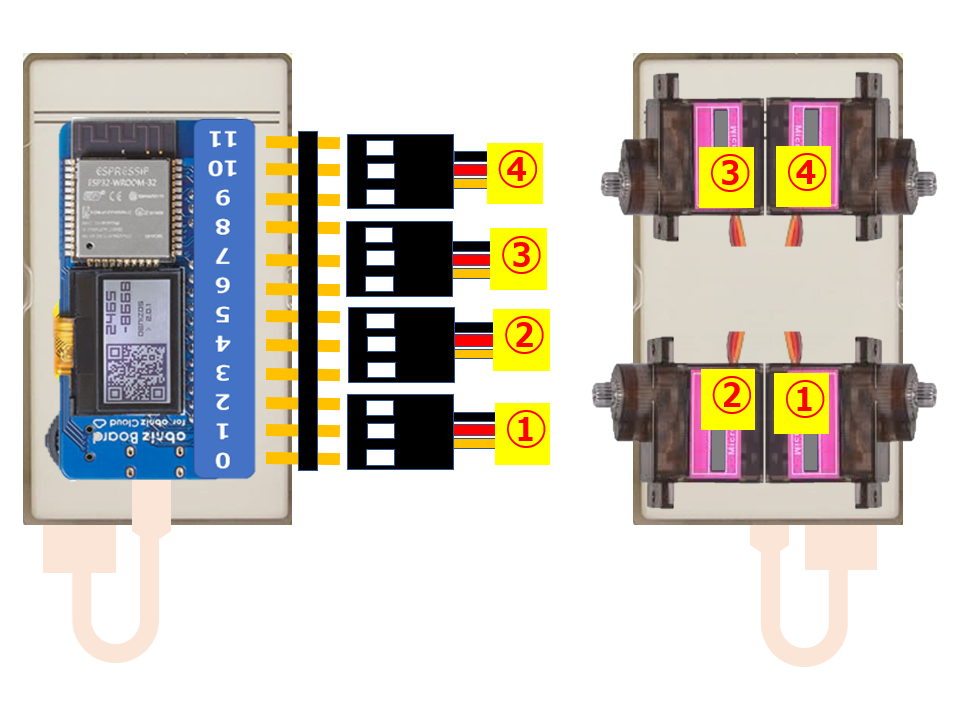 # 組み立て手順動画 サーボモータの片面には、前述の事前準備で両面テープを張り付けてあります。 @[youtube](https://youtu.be/F5T1QMWurGY) # キャリブレーション プログラムを起動すると各サーボに直立の90°への回転命令が発行されます。 その後、脚としてのサーボホーンを床に対して最も(※)直立になる位置で取り付けます。 ==※サーボ回転軸の溝の構造上、完全に直立はしないかもしれませんが問題ありません== @[youtube](https://youtu.be/SGfQpyK-I1w) # (参考)その他の歩容モデル ペース歩容とバウンド歩容のモデルも上げておきます。
前述のペース歩容を参考にサーボの絶対角度を計算して実装してみて下さい。
前述のトロット歩容モデルを参考に、サーボの絶対角度を計算して実装してみて下さい。
==角度は微調整が必要かもしれません==  # まとめ おどろくほど簡単な機構とプログラムで4足歩行できました。