google_homer が 2021年05月19日19時43分49秒 に編集
コメント無し
本文の変更
# 概要 簡単すぎる4足歩行ロボットです。足としてサーボ(+サーボホーン)4台をobniz 1Yに接続し、モバイルバッテリーの裏に両面テープで張り付けるだけでできます。分かり易いブロックプログラムで、数学などは使わず簡単なロジックで実現しました。 # 歩行動画 @[youtube](https://youtu.be/lNPCKF9c-DE) # 歩行モデル ( トロット歩容 ) 犬など多くの4足歩行動物が行っている、**トロット**という歩き方を採用しました。 1脚当たりサーボ1台の1自由度として構成し、歩容モデルを定義し各サーボの回転絶対角度を求めました。 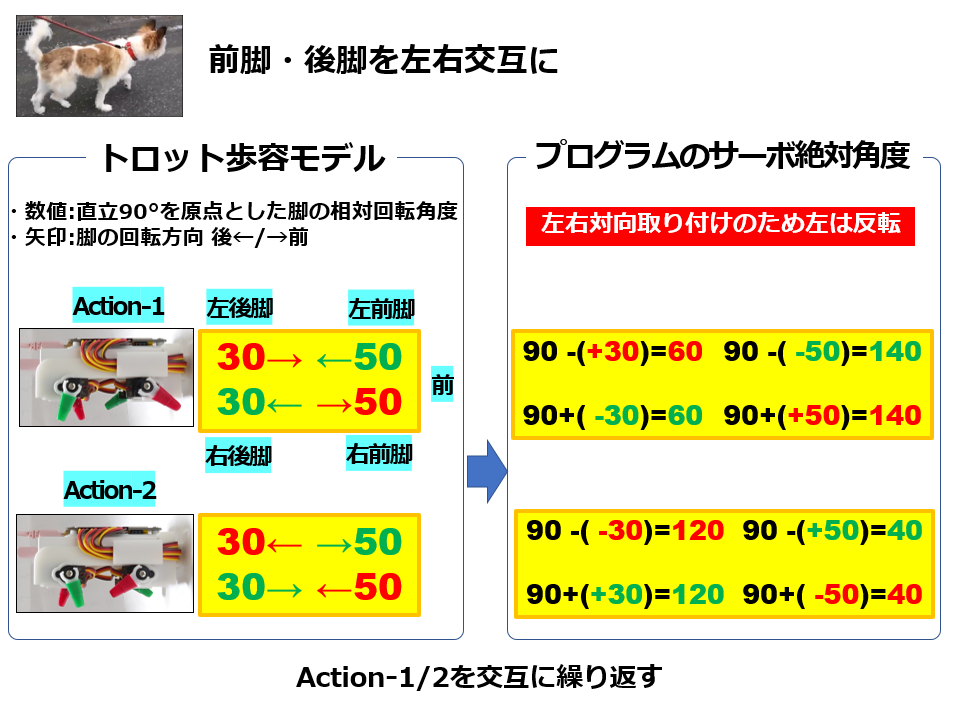
# プログラム ( 所要時間 10分 程度 )
# ブロックプログラム ( 所要時間 10分 程度 )
起動直後、Action-0関数で直立動作をさせています。 (詳細は後述しますが、初回のみこの状態の時に脚を取り付けます。) トロット歩容ボタンを押している間、歩き続けます。 Action-1/2関数は、前述の歩行モデルのActionのサーボ絶対角度に対応しています。 Action-1/2関数内の待ち時間を変更すれば、歩く速さを調整できます。 ==obniz IDはマスクしてあるので、自分のIDに変更して下さい== ==下記クリックでプログラムがクリアに表示されます== 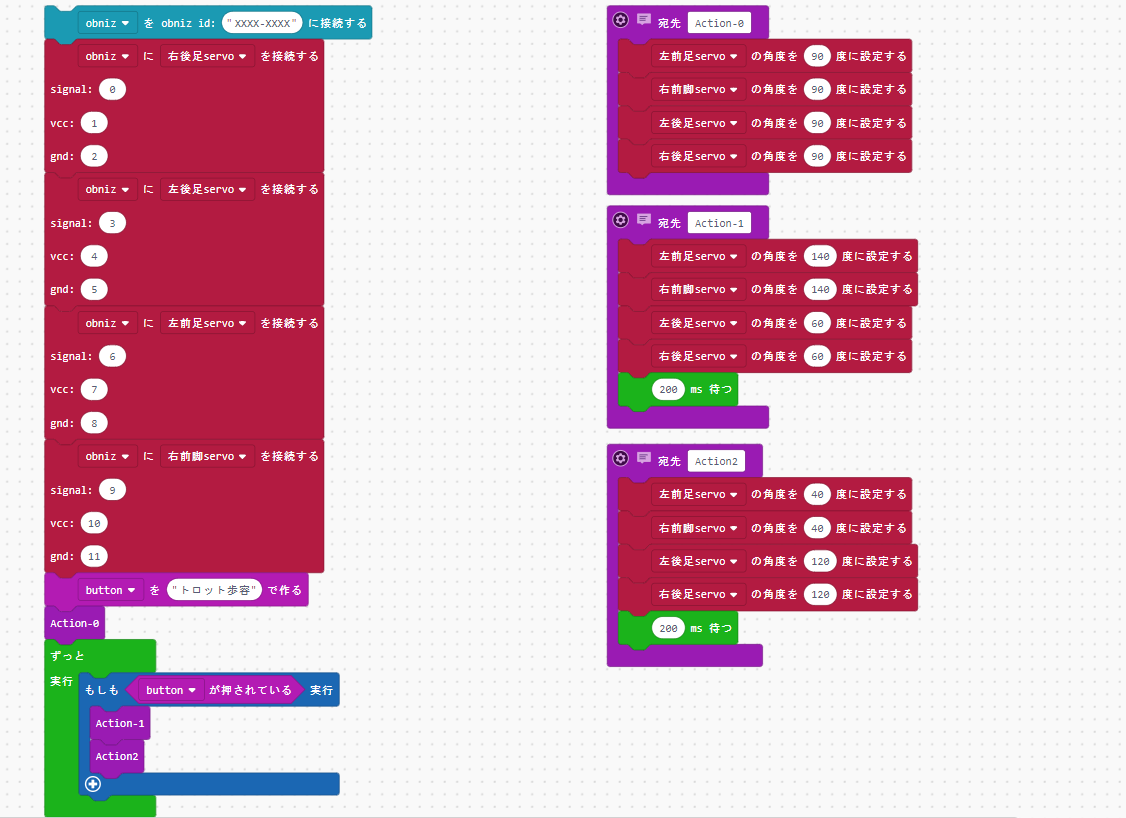
# ブロックプログラム入力動画 (所要時間 6分程度 ) 初心者向けに上述のブロックプログラムの入力動画をあげておきます。 複数サーボへの名前付けや、コピー&ペーストを用いた最小タッチでの入力など参考にして下さい。 ==ブロックプログラムの入力に慣れている方は飛ばして下さい== @[youtube](https://youtu.be/xGgd1V807BU)
# 部品 | 品名 | 型番 |数量 | 備考 | |:---:|:---|:---|:---| | マイコン | obniz 1Y | 1 || | サーボモータ | MG90S | 4 |付属のサーボホーンを脚として使用| | モバイルバッテリー | CHE-061 | 1 | chero Canvas、2A以上の出力必要 | | USBケーブル | Type-C 10cm | 1 | DAYSO | | ピンヘッダ | 両端ロング40ピン | 1 | 破断し12ピン使用 | | 強力両面テープ | 幅15mm |少々 | 45mm長×2枚切り取り | | ハサミ | |1 | 両面テープ切断用 | 界隈なご家庭には、モバイルバッテリーとサーボモータ数台は必ずストックがあると思うので、obniz 1Y以外の費用は実質0円。(のはず)  # 配線図 モバイルバッテリーの表面にobnizを、底面にサーボ4台を配置します。 ==実際の配置・手順・ケーブル取廻し等は、下記組み立て動画を参照してください== 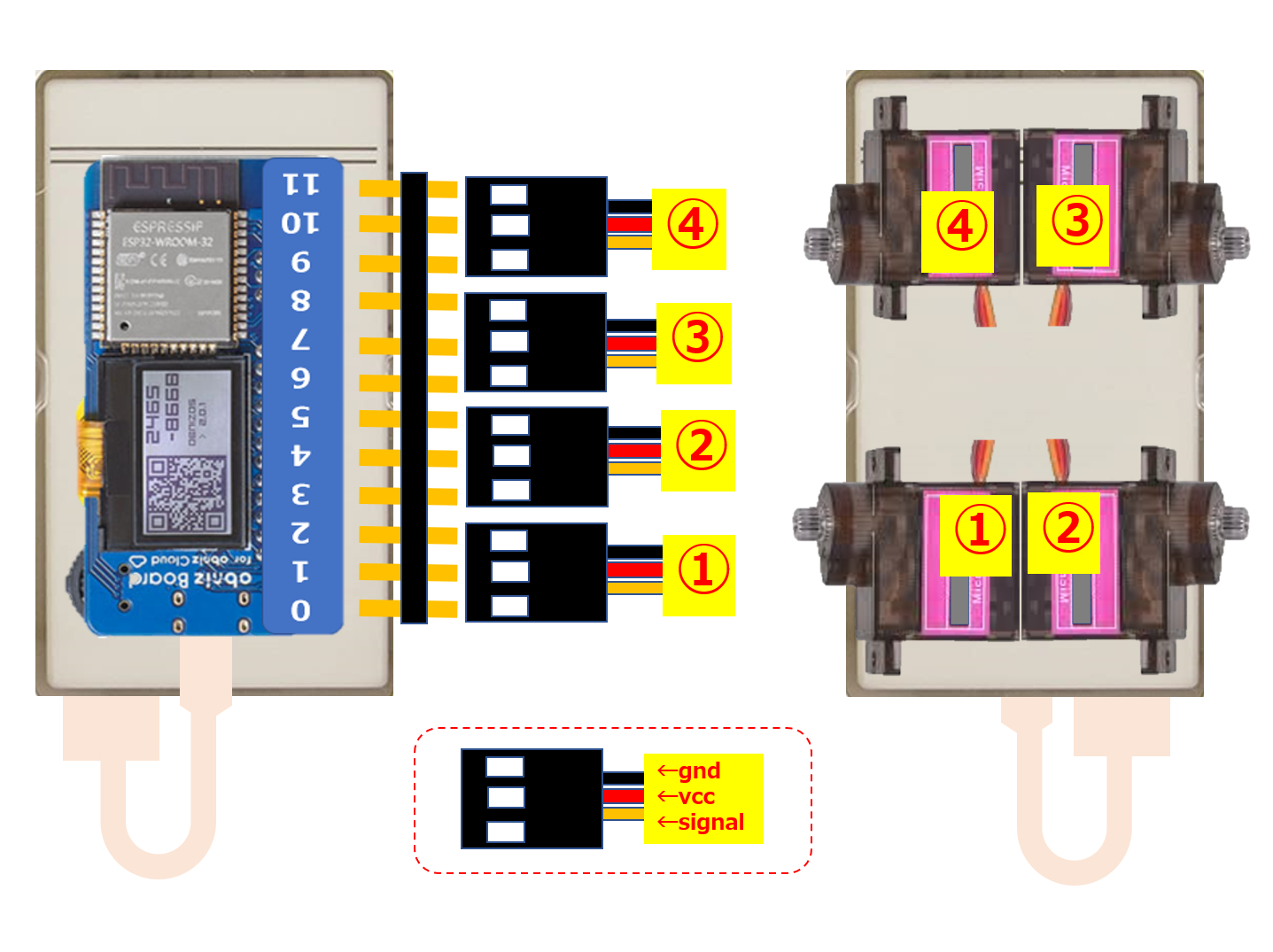 # 組み立て手順 ( 所要時間 3分 程度 ) ピンヘッダは40連から12連分を手で切り取って使用します。 サーボ4台を12連ピンヘッダを介してobnizに接続します。 サーボをモバイルバッテリーの裏に両面テープで貼り付けます。 ==サーボホーン(脚)は、後述のキャリブレーションで取り付けます== @[youtube](https://youtu.be/fqDoXtTwefo) # 脚取付と直立キャリブレーション( 所要時間 1分 程度 ) ロボットの脚として、サーボモータ付属のサーボ一ホーンの一番小さいやつを利用します。 プログラムを起動すると、各サーボに直立の90°への回転命令が発行されます。 (動きは見えずらいですが、下記動画の音でサーボが90°に回転した事を確認できます。) その後、サーボホーンを床に対して最も(※)直立になる位置で取り付けます。 あとは画面のトロット歩容のボタンを押して、歩行を楽しんで下さい。 ==※サーボ回転軸の溝の構造上、完全に直立はしないかもしれませんが問題ありません== @[youtube](https://youtu.be/SGfQpyK-I1w) # まとめ おどろくほど簡単な機構とプログラムで4足歩行できました。 サーボはMG90S使用しましたが、より安価で一般的なSG90当たりでも行けるはずです。 ==サイズや重量の異なるバッテリーを使用したりサーボの組付け位置が変わったりした場合などは、サーボの角度を微調整する必要があるかもしれません==