google_homer が 2021年05月16日21時36分03秒 に編集
コメント無し
本文の変更
# 歩行動画 @[youtube](https://youtu.be/lNPCKF9c-DE)
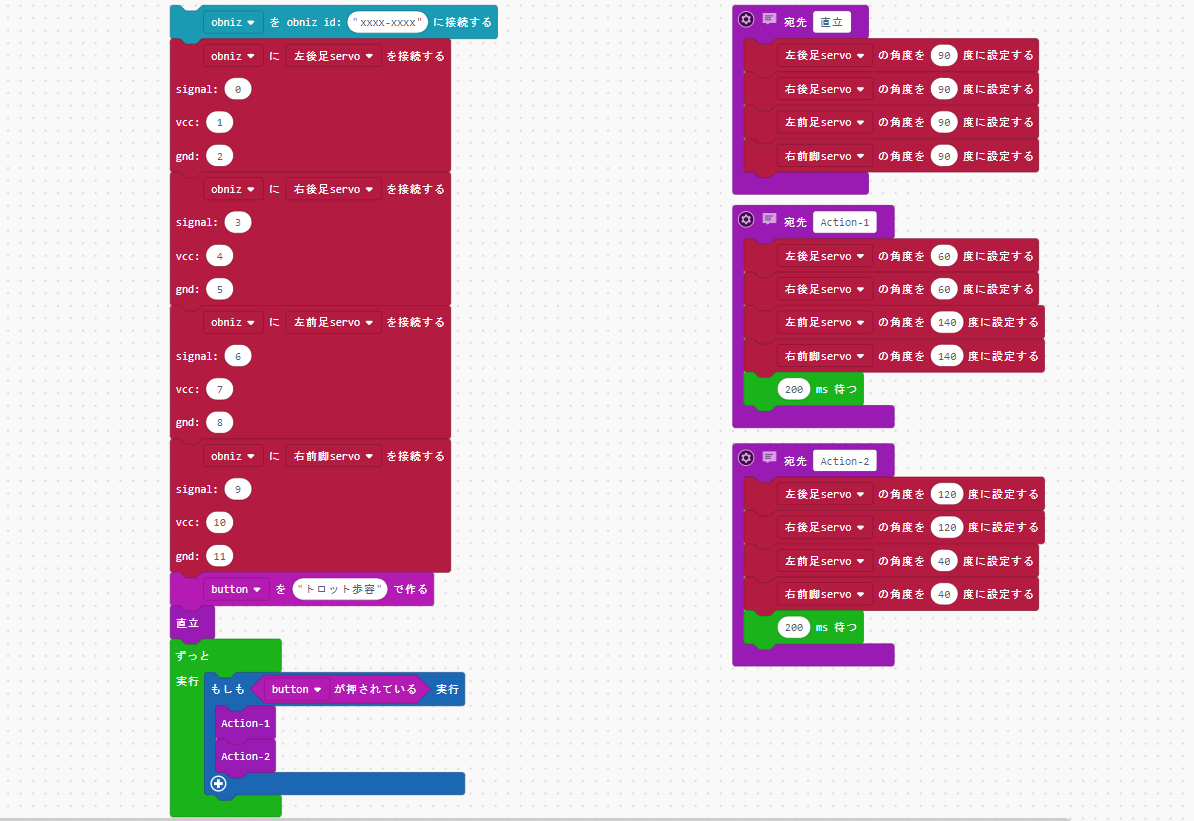
#組み立て準備 [](url) # 組み立て手順動画 @[youtube](https://youtu.be/F5T1QMWurGY) # 歩行モデル 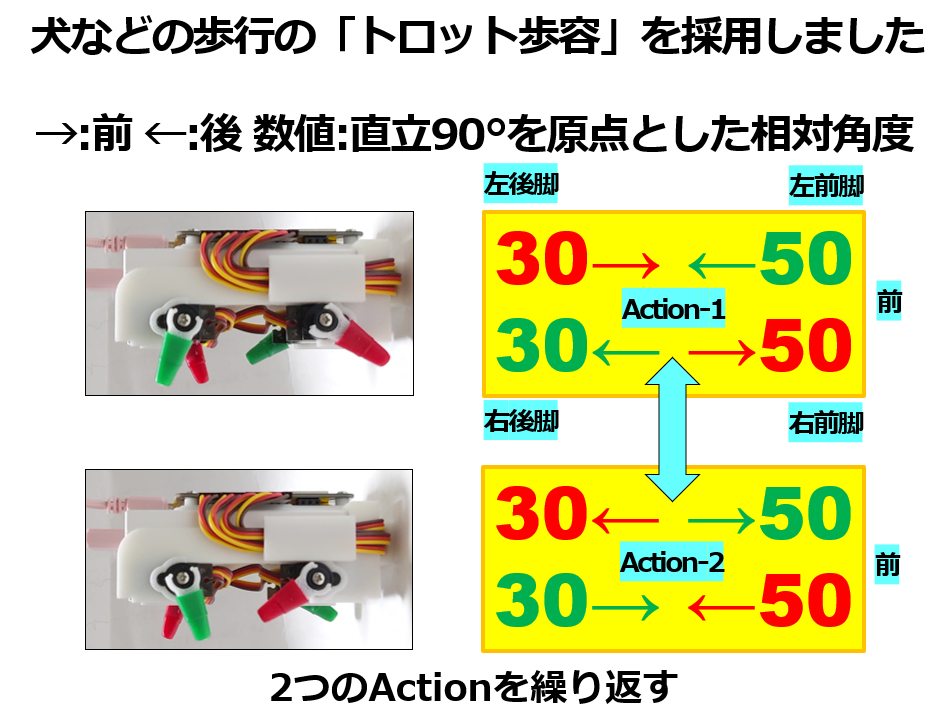 # プログラム 上記モデルからサーボの絶対角度を計算して設定しています。 サーボは左右対向で組み付けのため、左右で角度の大小が反転しています。 プログラム起動直後は直立し、ボタンを押している間歩行します。 下記イメージをクリックするとプログラムがクリアに見えます