nakkyi が 2022年09月09日20時40分58秒 に編集
コメント無し
本文の変更
1.初めに ALGYAN 7th 記念イベントのプレゼントで戴いた「ソラカメ」を見張り用に、M5stick Cを使ってサーボモーターを動かしてみました。 2.サーボモーターの取り付け 「ソラカメ]が結構重たいのロボット用の丈夫なサーボモーターを使いました。安定させるために下部のヨー軸サーボをプラボックスの内側に固定しました。その上にピッチ軸のサーボを取り付けました。 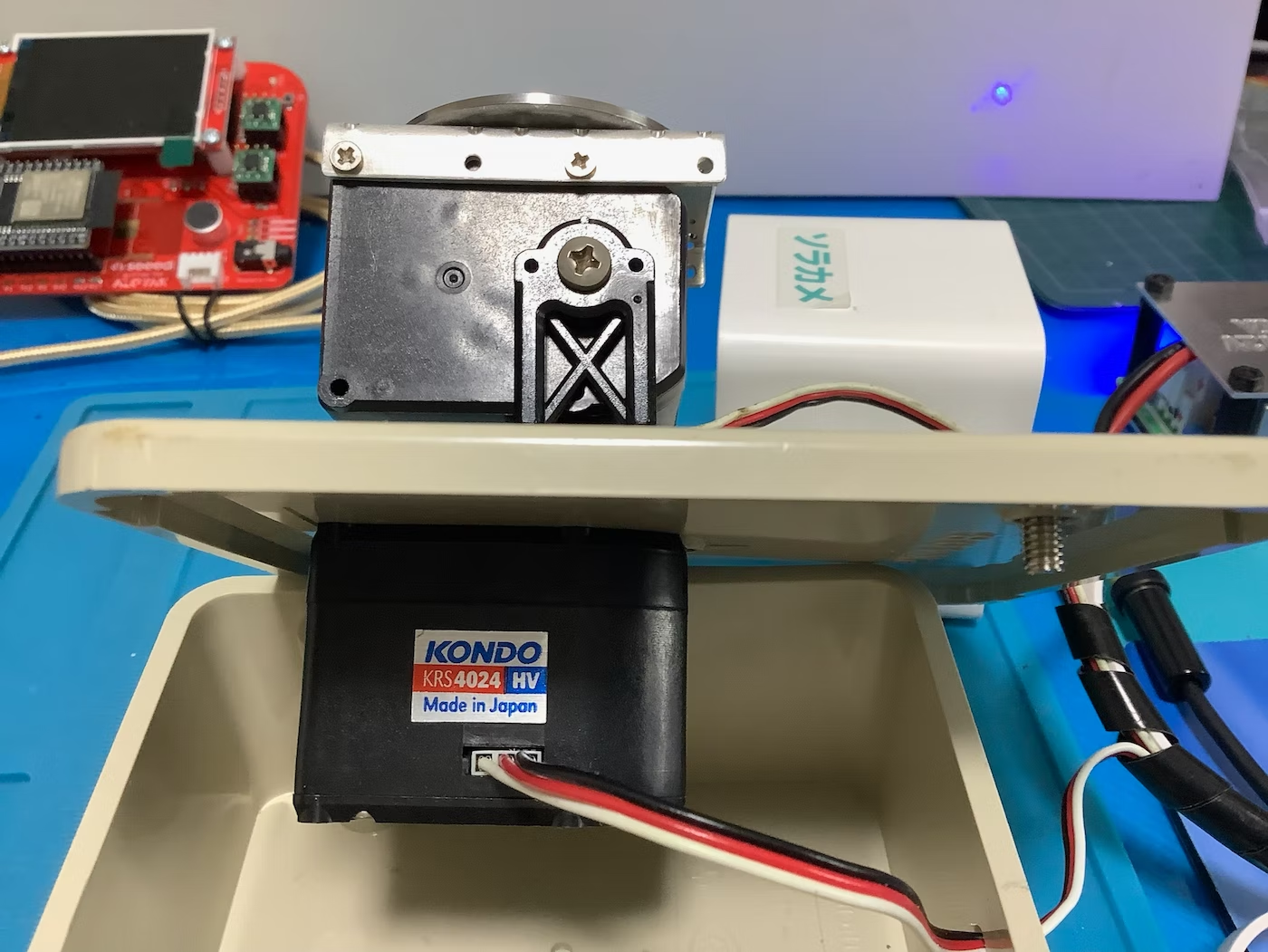 3.ソラカメ付属品の丸い鉄板を両面テープで張り付けました。  4.M5stick Cのサーボモーター用自作HAT 今回使ったサーボモーターが使ったサーボモーターが11.5V用のHVサーボモーターのためサーボ用電源に12Vノ安定化電源を使うため、M5Stick用サーボモーターHATを自作しました。 
5.これにサーボモーターのコネクターと電源をつなぎました。
5.サーボモーターのコネクターと電源の接続
それと電源確認用のLEDを付けました。接続はこれだけです。  6.サーボモーター駆動ベース完成 「ソラカメ}の駆動用モータードライブが出来ました。 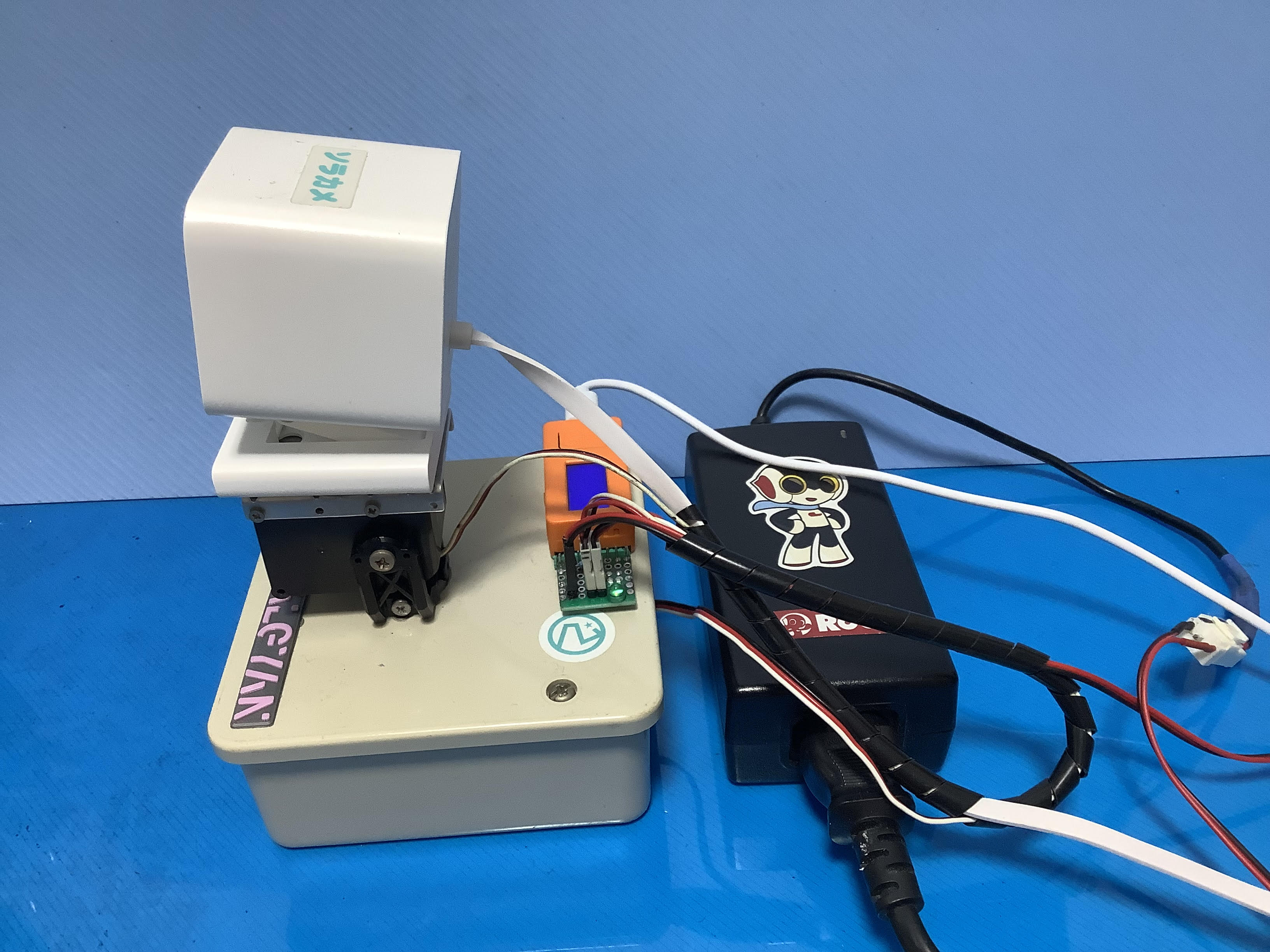 7.作動テストの動画 サーボモーターで「ソラカメ」を動かした時の「ソラカメ」の動画です。 @[youtube](https://youtu.be/UjuM2sUmHtM) 8.部品表 | 名称 | 仕様 | メーカー | 数量| |---|---|---|---| |カメラ | ソラカメ |ソラコム | 1| |サーボモーター |KSR4024 HV| KONDO | 2| |コントローラー |M5stick C|M5STACK| 1 |HAT |自作HAT |自作 | 1| |BOX |プラボックス| ニチドウ| 1 | 9. 回路図 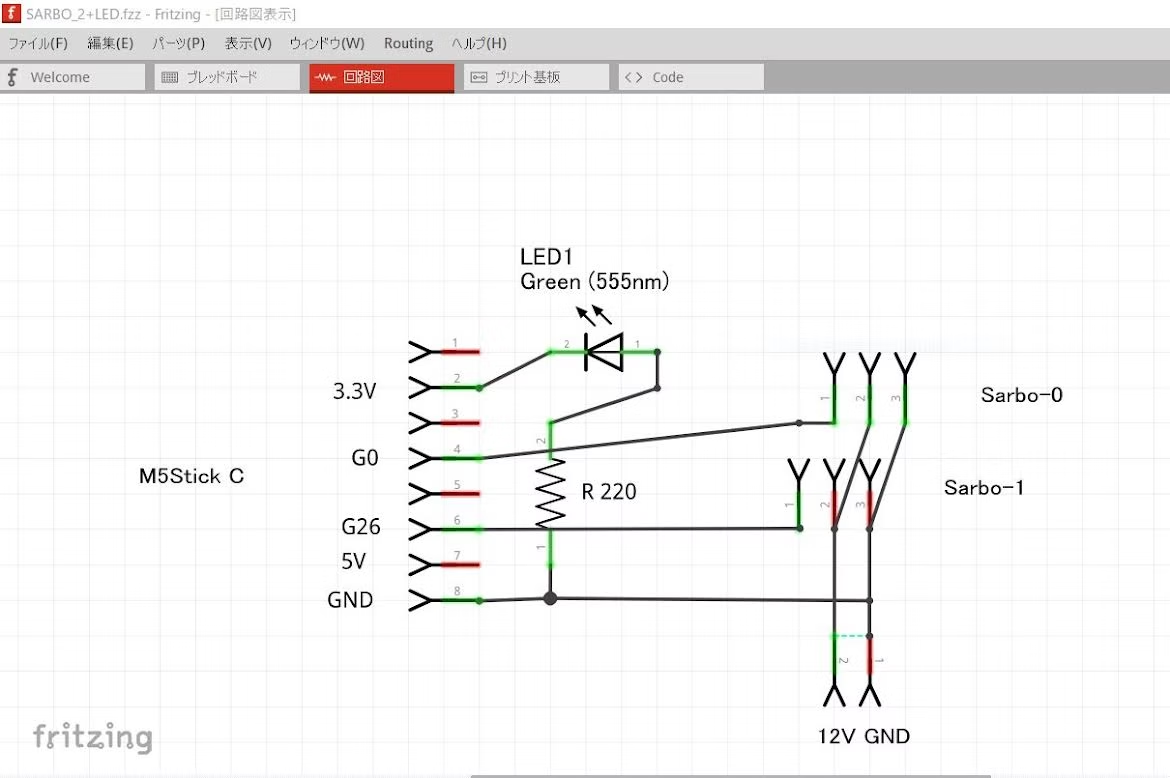 10.プログラム 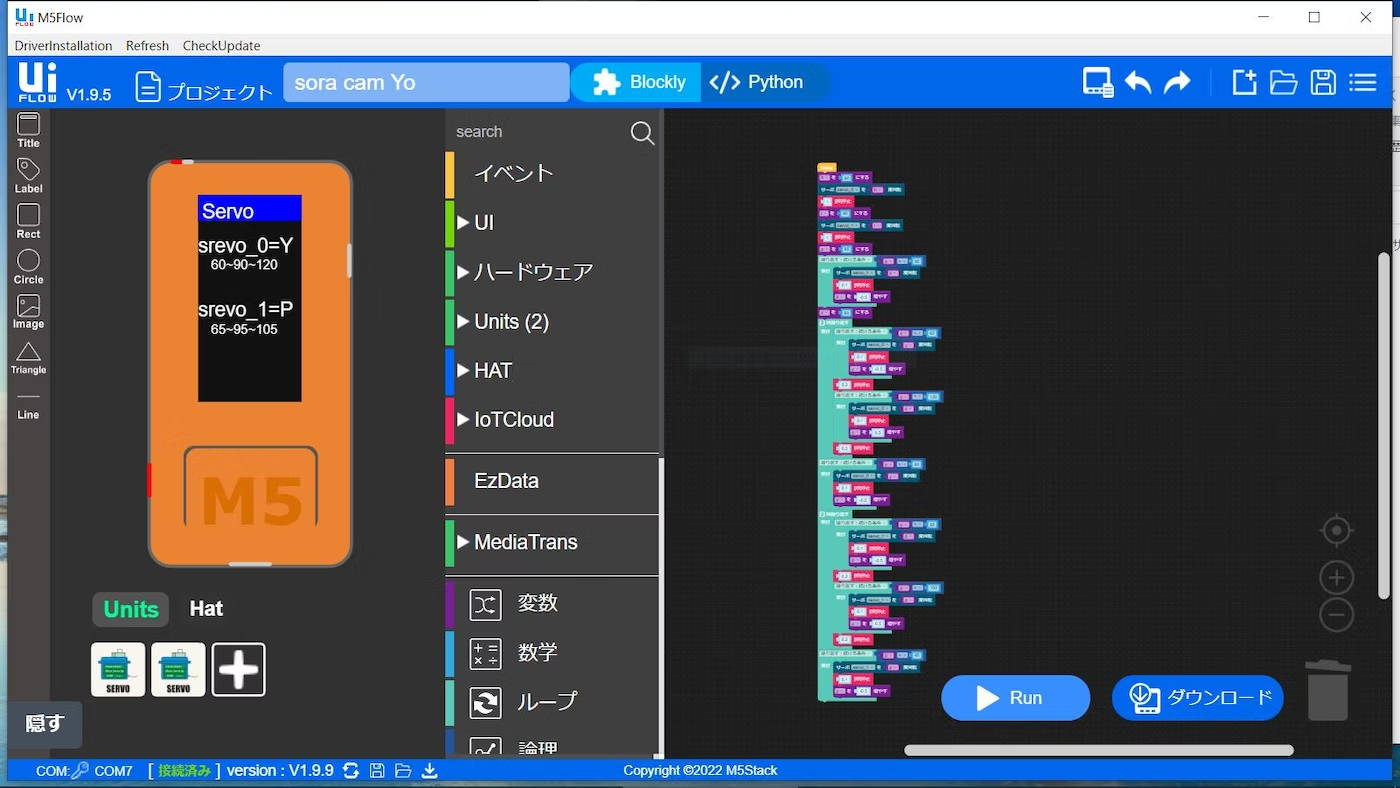 11.終わりに 取り合えず、サーボモーターを使って、プログラムで自動操作ができることを確認できました。 もっと滑らかに映るように調整をしたいと思います。 さらに遠隔操作や、色々なセンサーによる自動運転を目指して改良したいと思います。