
masayasan が 2021年10月15日19時28分07秒 に編集
コメント無し
本文の変更
# 概要 タミヤカムロボットはそれ単体でもよく出来た玩具ですが、後からマイコンボードやサーボモータを追加出来る様な構造になっています。 大分昔にArduino Nanoで改造したのですが、最近覚え始めたPICで改めて改造し直しました。 Arduino Nanoですと時折モーターの影響による電圧降下で暴走したので、Arudinoよりも低電圧で動作可能なPICの方が向いていると思います。 あと、PICの方が省スペースで設置出来るメリットがありますしね。 *備忘録も兼ねてるので、記事の内容は随時更新していきます。 取敢えずMCCの設定とプログラムを書いて、一通り書き終わったら回路図も作成していきたいです。 # DRV8830モータードライバ ## 部品選定 パワーMOSFETでHブリッジ回路組んで、モーター制御も検討しましたが、スペースの問題とI2Cで制御できるドライブがあったので秋月電子で購入したAE-DRV8830を選定。 動作電圧2.75V~なのも魅力。 ## MCC設定 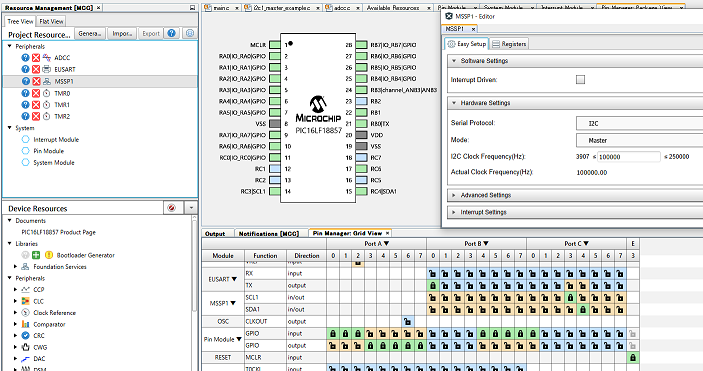 ## プログラム I2Cモジュールを選択して設定すると新たに”i2c1_master_example.c"ファイルが作成されるので、その中の”I2C1_Write1ByteRegister(i2c1_address_t address, uint8_t reg, uint8_t data)”関数を使用する。 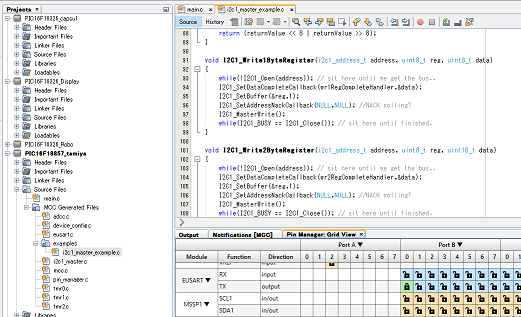 #include "mcc_generated_files/examples/i2c1_master_example.h"を宣言しないと、I2Cの関数が使用できないので宣言する。 スピード(電圧)は0x06-0x3F(0.48V-5.06V)まで設定出来るけど、0x06では動かない。 ``` #include "mcc_generated_files/mcc.h" #include "mcc_generated_files/examples/i2c1_master_example.h" void Forward(uint8_t Speed) { Speed=Speed<<2; Speed=Speed+0b10; I2C1_Write1ByteRegister(0x63, 0x00, Speed); I2C1_Write1ByteRegister(0x64, 0x00, Speed); __delay_ms(500); } void Back(uint8_t Speed) { Speed=Speed<<2; Speed=Speed+0b01; I2C1_Write1ByteRegister(0x63, 0x00, Speed); I2C1_Write1ByteRegister(0x64, 0x00, Speed); __delay_ms(500); } void main(void) { SYSTEM_Initialize(); while (1) { //Speed 0x06-0x3F Forward(0x16); __delay_ms(2000); Back(0x2F); __delay_ms(2000); } } ``` ## 動画 左右のモーターは可変出来るので、曲がるスピードを変えたり振り返ることも出来る。 @[youtube](https://youtu.be/CgO6-lgJeao) # 超音波センサ ## HC-SR04 トリガで超音波を発振して、反射した音波を受けるとエコー端子がONする。 詳細はスイッチサイエンスなどからデータシート確認出来るのでそちらを参照して下さい。 計算方法も乗っています。 ## MCC設定 ## プログラム 平均化しなくても、それなりに距離が出ていたので速度重視で平均化しなかった。 変数numの値を変更することで平均化回数を設定。 ``` #include "mcc_generated_files/mcc.h" #include "stdio.h" float Distance() { // uint16_t distance; int num=1; float distance1; float distance2; for (int i = 0; i < num; ++i) { RA5 = 0; __delay_us(2); RA5 = 1; __delay_us(10); RA5 = 0; uint16_t Time1 = TMR1_ReadTimer(); while (RC0 == 0 || TMR1_ReadTimer() - Time1 > 65500); Time1 = TMR1_ReadTimer(); while (RC0 == 1 || TMR1_ReadTimer() - Time1 > 65500); Time1 = TMR1_ReadTimer() - Time1; // distance=Time1; distance1 = Time1 / 8 * (331.5 + 0.61 * 20) *100 / 1000000; distance2 = distance2 + distance1; __delay_ms(60); } distance2 = distance2 / num; return (distance2); } void main(void) { SYSTEM_Initialize(); while (1) { printf("Distance_%f\n", Distance()); } } ``` ## 動画 小さくて見にくいですが、障害物を検知してモニタに表示されている数値が変化しています。 @[youtube](https://youtu.be/i4MNTxGRLWM) # 照度センサ 照度センサーと100kΩの抵抗で分圧させた電圧をPICで読み取る。 ## MCC設定 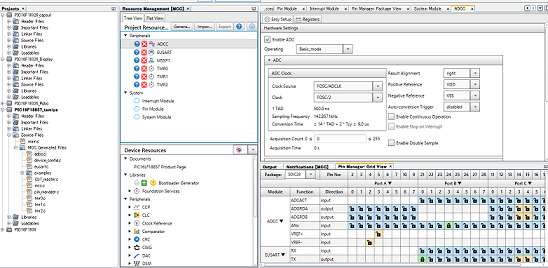 ## プログラム 暗くなると目が光り、明るくなると消灯する。 ``` #include "mcc_generated_files/mcc.h" void Lighton(void) { RA4 = 1; RA3 = 1; } void Lightoff(void) { RA4 = 0; RA3 = 0; } void main(void) { SYSTEM_Initialize(); while (1) { int Vale=ADCC_GetSingleConversion(channel_ANB3); if(Vale<100){ Lighton(); }else if(Vale>=200){ Lightoff(); } } } ``` ## 動画 @[youtube](https://youtu.be/zx7yeSvwI3A) # サーボモータ ## QKY66 形状はSG90と互換性があります。Amazonで20個/2000円くらいで購入。 カムロボットの両腕に取付けました。 0.5ms~2.5msのパルス信号を送ると0~180°回転します。 ## プログラム PICのサーボ制御はタイマー2とCCPモジュールで可能ですが、貧弱な電源だと電圧降下が起きて複数軸のサーボは制御出来ません。 2軸くらいなら単三乾電池4本でもOKかもしれませんが、タンクモーターにも電源取られるので極力省エネで行きます。 今回はタイマー制御で0.5ms~2.5msのパルス信号を送り、両腕の上げ下げを行いました。 ``` #include "mcc_generated_files/mcc.h" int ServoPOSI1 = 58; int ServoPOSI2 = 58; int ServoPOSI3 = 58; int ServoPOSI4 = 58; void ServoQuickMove(int Angle1, int Angle2) { int ServoPOSI1 = Angle1; int ServoPOSI2 = Angle2; for (int i = 0; i < 1; i++) { RA6 = 1; RA3 = 1; for (int j = 0; j < ServoPOSI1; j++) { __delay_us(10); } RA6 = 0; RA3 = 0; for (int k = 0; k < 500 - ServoPOSI1; k++) { __delay_us(10); } } __delay_ms(1); for (int i = 0; i < 1; i++) { RA7 = 1; for (int j = 0; j < ServoPOSI2; j++) { __delay_us(10); } RA7 = 0; for (int k = 0; k < 500 - ServoPOSI2; k++) { __delay_us(10); } } __delay_ms(1); } void ServoMove(int delayTIME, int Angle1, int Angle2) { while (ServoPOSI1 != Angle1 || ServoPOSI2 != Angle2) { for (int i = 0; i < delayTIME; i++) { __delay_us(1); } // 0,5ms:0°_1.45ms:90°_2.4ms:180° // printf("move"); if (ServoPOSI1 < Angle1) { ++ServoPOSI1; } else if (ServoPOSI1 > Angle1) { --ServoPOSI1; } else { ServoPOSI1 = Angle1; } if (ServoPOSI2 < Angle2) { ++ServoPOSI2; } else if (ServoPOSI2 > Angle2) { --ServoPOSI2; } else { ServoPOSI2 = Angle2; } for (int k = 0; k < 5; k++) { for (int i = 0; i < 1; i++) { RA6 = 1; for (int j = 0; j < ServoPOSI1; j++) { __delay_us(10); } RA6 = 0; for (int k = 0; k < 100 - ServoPOSI1; k++) { __delay_us(10); } } __delay_us(1); for (int i = 0; i < 1; i++) { RA7 = 1; for (int j = 0; j < ServoPOSI2; j++) { __delay_us(10); } RA7 = 0; for (int k = 0; k < 100 - ServoPOSI2; k++) { __delay_us(10); } } __delay_us(1); } } } void Banzai(void) { ServoMove(10, 60, 30); __delay_ms(1000); ServoMove(10, 30, 60); __delay_ms(1000); } void main(void) { SYSTEM_Initialize(); while (1) { Banzai(); } } ``` void ServoQuickMove(int Angle1, int Angle2) void ServoMove(int delayTIME, int Angle1, int Angle2) サーボを制御する関数は二通り制作しましたが、今回は速度を遅くするServoMoveを使用しました。 ## 動画
@[youtube](https://youtu.be/vz9aO5RjBZ4) (https://youtu.be/vz9aO5RjBZ4)
@[youtube] (https://youtu.be/vz9aO5RjBZ4)
# フォトリフレクタ ## LBR-127HLD 秋月電子で購入、100~300Ω程度の抵抗を入れて赤外線LEDを点灯。 電源に直結させていますが、消費電力の事を考えると、トランジスタ及びPWM制御で点灯たいので 何れ回路修正する予定。 ## MMC設定 printf関数を使ってモニタ上に表示させる設定。 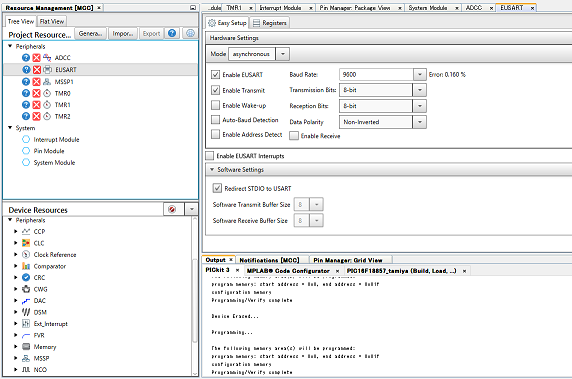 ## プログラム 取敢えずIOチェック用のプログラムを作成。 シリアルモニタで確認出来る様にする。センサー位置の並びをあまり考えずに配線したので、ソフト上で並びを整理しておきます。 ``` #include "mcc_generated_files/mcc.h" #include "stdio.h" int PhotoRef(void) { int PhotoVal = 0; if (RA1 == 1) { PhotoVal =PhotoVal+ 0b010000; } if (RB7 == 1) { PhotoVal =PhotoVal+ 0b01000; } if (RB5 == 1) { PhotoVal =PhotoVal+ 0b0100; } if (RA0 == 1) { PhotoVal = PhotoVal + 0b10; } if (RB6 == 1) { PhotoVal =PhotoVal+ 0b01; } return PhotoVal; } void main(void) { SYSTEM_Initialize(); while (1) { //0~31の変化 printf("%d\n", PhotoRef()); } } ```
# DFplayer mini # 赤外線受信センサ
#フォトリフレクタ