masayasan が 2021年04月30日18時11分37秒 に編集
コメント無し
本文の変更
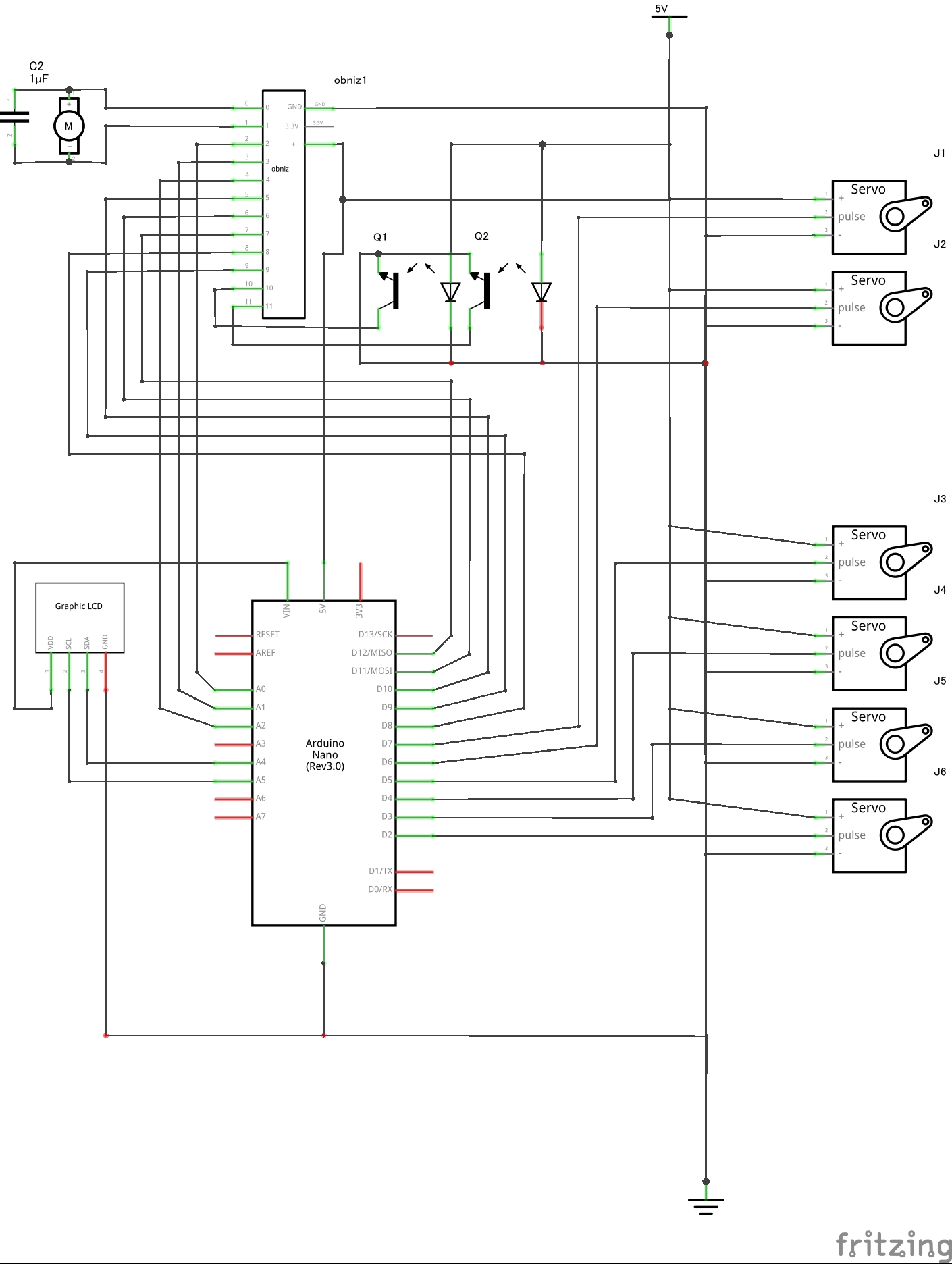
# デモ動画 @[youtube](https://youtu.be/xj4m8oHvxnQ) # 装置概要 製造現場で使用されているロボットアーム及び搬送コンベアのミニチュアを用いて、シーケンス制御について学べる装置を制作した。 ロボットアームのモーション制御はArduino_Nanoで行い、コンベア制御、及びロボットアームの起動タイミングはObniz 1Yで行った。 # シーケンス制御内容 :::plantuml:ロボットアーム制御 @startuml (*) --> "出発地へブロックを置く" --> "ロボット 起動許可信号ON" If "ロボット設定位置入力" then --> [現在位置≒設定位置] "ロボット設定位置へ移動" -->(*) else --> [現在位置=設定位置] "現在の位置保持" -->(*) Endif @enduml ::: ロボットアームが起動する前提条件として起動許可信号がONしていることが必須となる。 設備の異常などでロボットを停止しておきたい時は、起動許可信号をOFFにしておく。 起動許可信号がONしている状態では、ロボットは設定された位置を保持しようとする。 設定位置を現在位置と異なる値にすることでロボットは設定位値へ移動する。 :::plantuml:コンベア制御 @startuml (*) --> "出発地点にブロック設置" --> "コンベア起動" --> "最終地点にブロック設置" --> "コンベア停止" -->(*) @enduml ::: コンベアの制御は出発地点にブロックが置かれたら起動を開始し、最終地点に運ばれたら起動を停止する。 # 使用部品 - Arduino Nano(互換品)・・・秋月電子 - Obniz 1Y - [I2C接続小型キャラクタLCDモジュール] AE-AQM1602A(KIT)・・・秋月電子 - [サーボモータ] Quimat QKY66・・・Amazon - ユニバーサルプレート・・・タミヤ工作 - トラック&ホイールセット・・・タミヤ工作 - プラ材5mm角棒・・・タミヤ工作 - 3mm赤外線LED940nm・・・秋月電子 - 3mmフォトレジスタ940nm・・・秋月電子 - 3・2mmビス、ナット - 電線