takana_piripiri が 2019年10月09日12時56分29秒 に編集
コメント無し
タグの変更
吉幾三
robotarm
本文の変更
ロボットアームってロマンですね。 男子の夢ですね。 今回、YouTubeで他の人が作っていたのを見てたら作りたくなったので作りました。

[ロボットアァァム作ってみた](https://youtu.be/-f5tNvR6LG8) 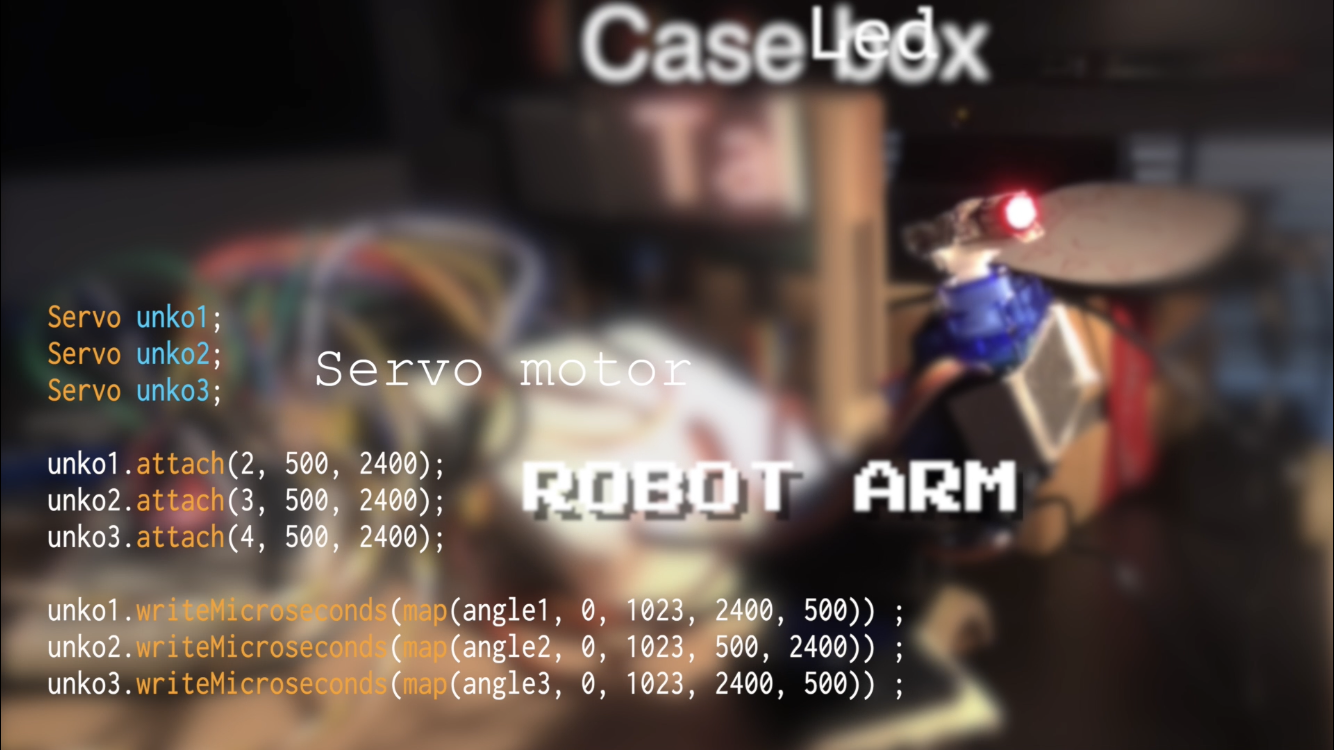 【材料】 ・arduino(なんでも) ・サーボモーター(3こ) ・サーボモーター用ケース(Amazon) ・可変抵抗器(ボリューム) ・ジャンパワイヤ ・ブレッドボード ※サーボモータとは、、、 普通のモーターは電気を流すと回り続けるやつですが、サーボモータは電気と「信号」を受け取って、任意の角度に軸を動かす!みたいな動きをします。 ※可変抵抗器とは、、、
通常の抵抗とは違い、つまみを回して抵抗値を可変させられる抵抗。take off !
【仕組み】 ・可変抵抗器のつまみを入力とする。 ・その値をmap関数でサーバモータの角度内に収まる様に変換。 ・変換した値をサーボモータの入力とする。 【まず試作】
上記の思想のもと、割り箸で試作します。
上記の思想のもと、割り箸で試作します。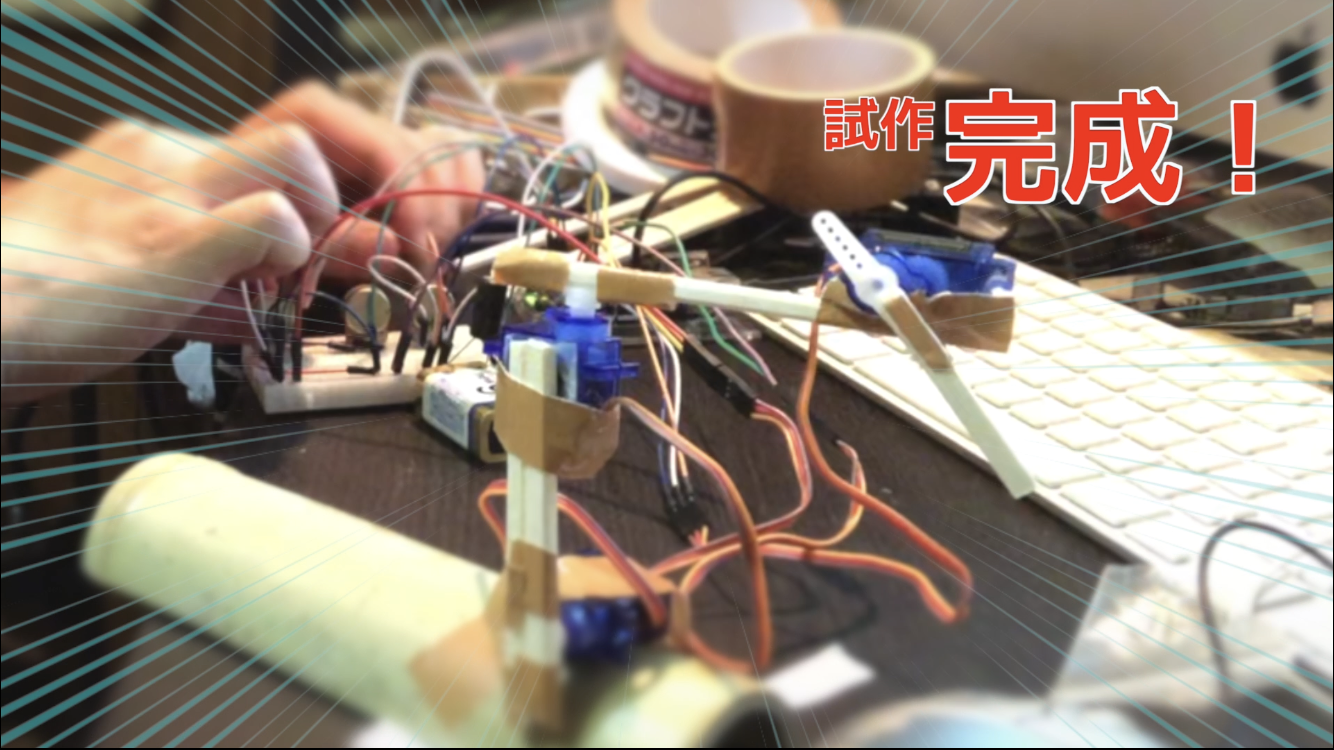 出来ました。
以降、、記事編集続きます。。