n-shinichi が 2023年04月21日07時57分39秒 に編集
コメント無し
本文の変更
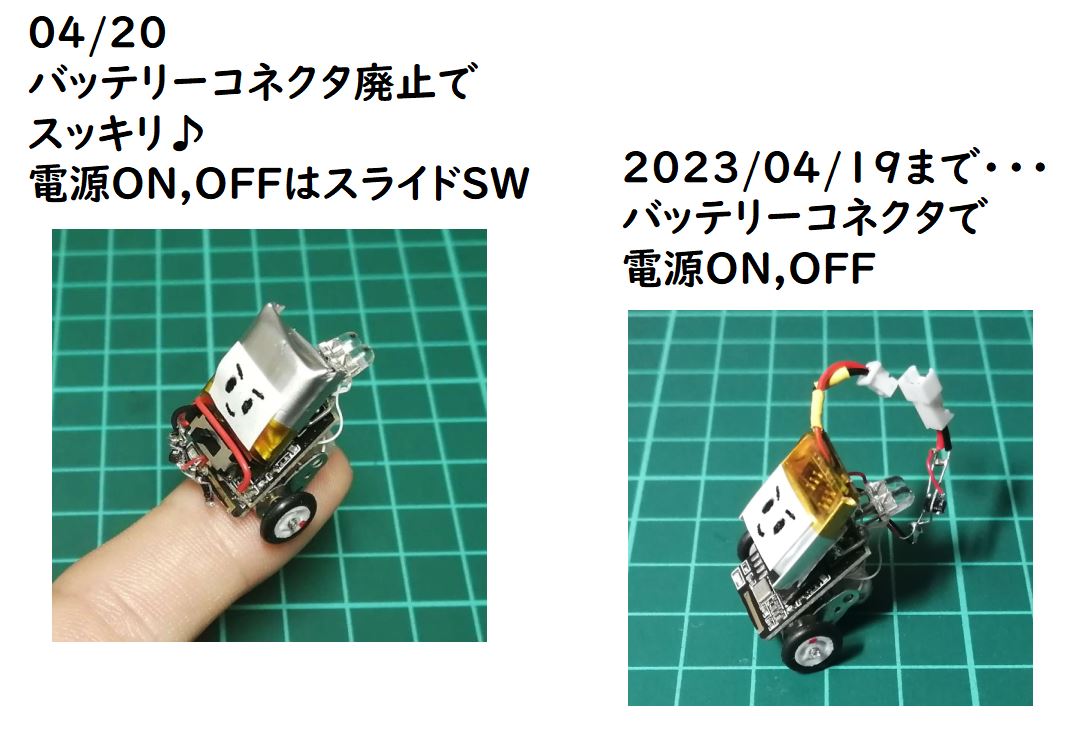
少し進捗したので更新
進捗したので更新
動作確認の動画です。 ATOMくんを押して動かせるほどの力持ちです。 https://twitter.com/shinichi_nin/status/1649183209018781698
モータドライバを使わず、マイコンポート出力で直接ステッピングモータを 駆動して動く小さなロボです。 ESP-01マイコンモジュールをベースにしています。 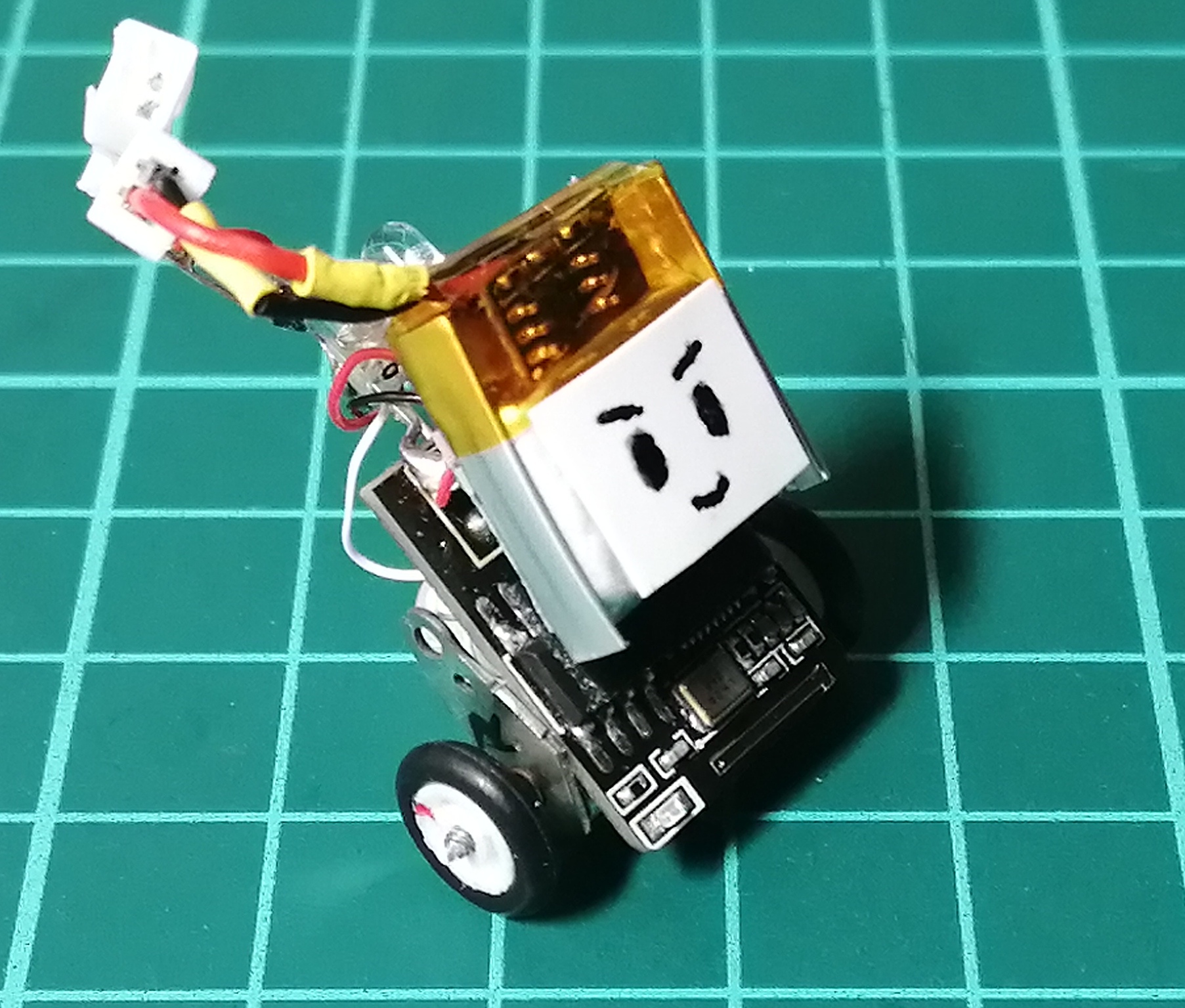 一般に2相バイポーラステッピングモータは4本の駆動出力が必要です。 モータ2個動かす場合は8本の出力線が必要です。 ESP-01マイコンモジュールはポートの引き出しが4本しかないので足りません。。。 これをダイオードで負荷オフセット動作になる中性点を作りステッピングモータのコイルをスター結線にすることで2本の駆動線出力動かせるようになります。これでステッピングモータ2個を4本の出力線で動かすことだできます。 駆動自体は中性点電圧が出力にある3レベルインバータ方式になります。 補助輪は100キンのビーズを利用しています。 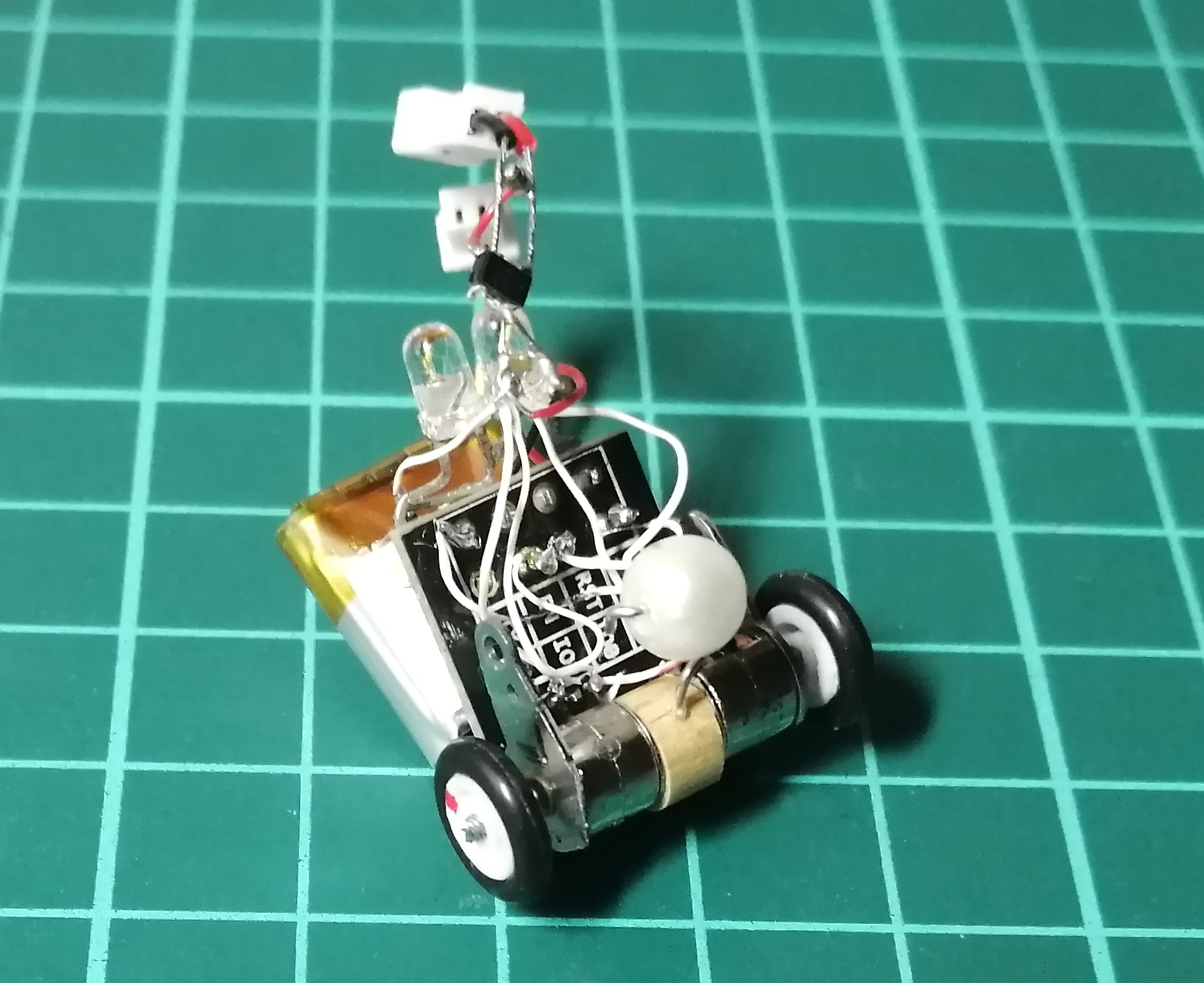 スマホからの無線操縦の構成は スマホ ⇐BLE⇒ M5StickC ⇐ESPNOW⇒ ESP-01 M5StickCが中継機になっています。 電池が小さいため容量ももちろん小さいのでスマホ操縦では 最も消費電力の大きな無線通信を低消費電力のBLEを 使いたいところですがESP8266はBLEが使えません。そこで M5StickCを中継器にすることで スマホとはBLE、、、ESP-01とはESPNOWで中継通信しています。 走行テストしてるところです。 https://twitter.com/shinichi_nin/status/1648284120001441792 詳しい説明などがあります。 https://n-shinichi.hatenablog.com/entry/2023/04/18/213456?_ga=2.69508504.963906517.1681486498-124876159.1618931563