rbt が 2021年02月21日21時04分07秒 に編集
コメント無し
タイトルの変更
スマホカメラとObnizを使って人が近づいてくるとロボットの動きをゆっくりに/止めるプロトタイプ
スマホカメラとObnizを使って人が近づいて危険になるとロボットの動きをゆっくりに/止めるシステム
記事種類の変更
製作品
本文の変更
協働ロボットや教育用ロボットを使用する時に、人が近づくと止まるような安全対策を求められることがある。
既存のエリアセンサーは20万円以上するものが多いので、安く早く作れる仕組みを作ってみた。
既存のエリアセンサーは20〜30万円以上するものが多いので、安く早く作ってみた。
**必要なもの** - ロボット(ユニバーサルロボットや安川HC10など) - obniz 1個 - カメラ付きのスマホ 1個(pixel3で動作確認済み) - 5Vのリレー https://akizukidenshi.com/catalog/g/gP-01346/ - Wifi環境 - 配線 **作り方** 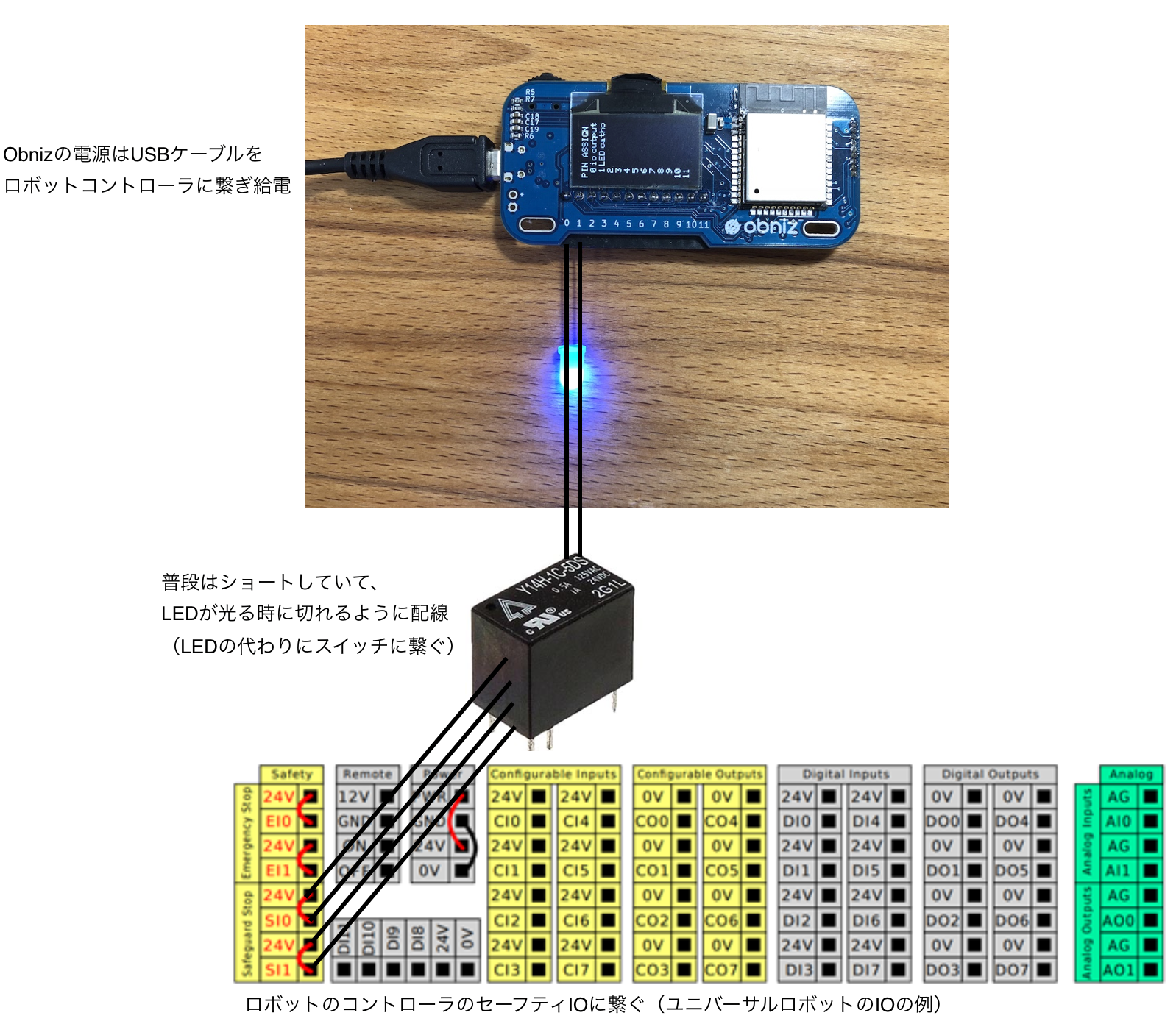
安全関係のIOは常にショートしているとロボットが早く動き、IOの配線が切れるとゆっくり動くか止まる仕組みになっている(ロボットメーカによって若干異なる)。
安全関係のIOは常にショートしているとロボットが早く動き、IOの配線が切れると人にぶつかっても安全なようにゆっくりになるか止まる仕組みになっている(ロボットメーカによって若干異なる)。
詳しくはリンク参照 https://www.universal-robots.com/articles/ur/interface-communication/connecting-internal-inputs-and-outputs-io-on-the-robots-controller/ 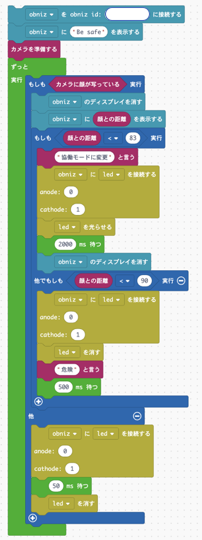 顔認識をして、ある一定の近さになると、「危険!」と音声で警告をし、それ以上近くなると「協働モードに変更」という音がなり、ロボットの安全IOが切れて、ロボットが遅くなる仕組み。 **使い方** 1. obnizにwifi接続しインターネットに接続する。 2. スマホでobnizのリンクを開き、ブラウザでカメラへのアクセスを許可する。 3. スマホをロボットの近くに置いておく。 4. スマホの方に人の顔が映ると、音声で警告し、最終的にロボットが止まる <参考にしたページ> https://obniz.com/ja/doc/guides/ai-robot-kit/detecthuman