myaon が 2021年02月28日21時57分26秒 に編集
初版
タイトルの変更
ラズパイで作るリモートカー
タグの変更
RaspberryPi
リモート
秋葉原2021
メイン画像の変更
本文の変更
コロナウイルスの影響でオリィ研究所やANAが提供している分身ロボットが注目されている。私も注目している内のひとりなのだが、技術的には個人でも作れるのではないかと考え、実装してみることにした。 まずRaspberry Piを遠隔操作するために「TeamViewer」というアプリを導入します。ラズパイ関係なく簡単にPCの遠隔操作が可能になるのでおすすめです。 > 自宅の Raspberry Pi を遠隔操作する【TeamViewer編】 https://iot-plus.net/make/raspi/remote-control-using-teamviewer-on-raspbian/ 次に回路・ハード周りを構築していきます。 回路は「ZeroBot」というプロジェクトを参考にほぼ同じ(マイコンはラズパイ3、バッテリーはエネループ4個直列)構成です。 > ZeroBot - Raspberry Pi Zero FPV Robot https://hackaday.io/project/25092/instructions 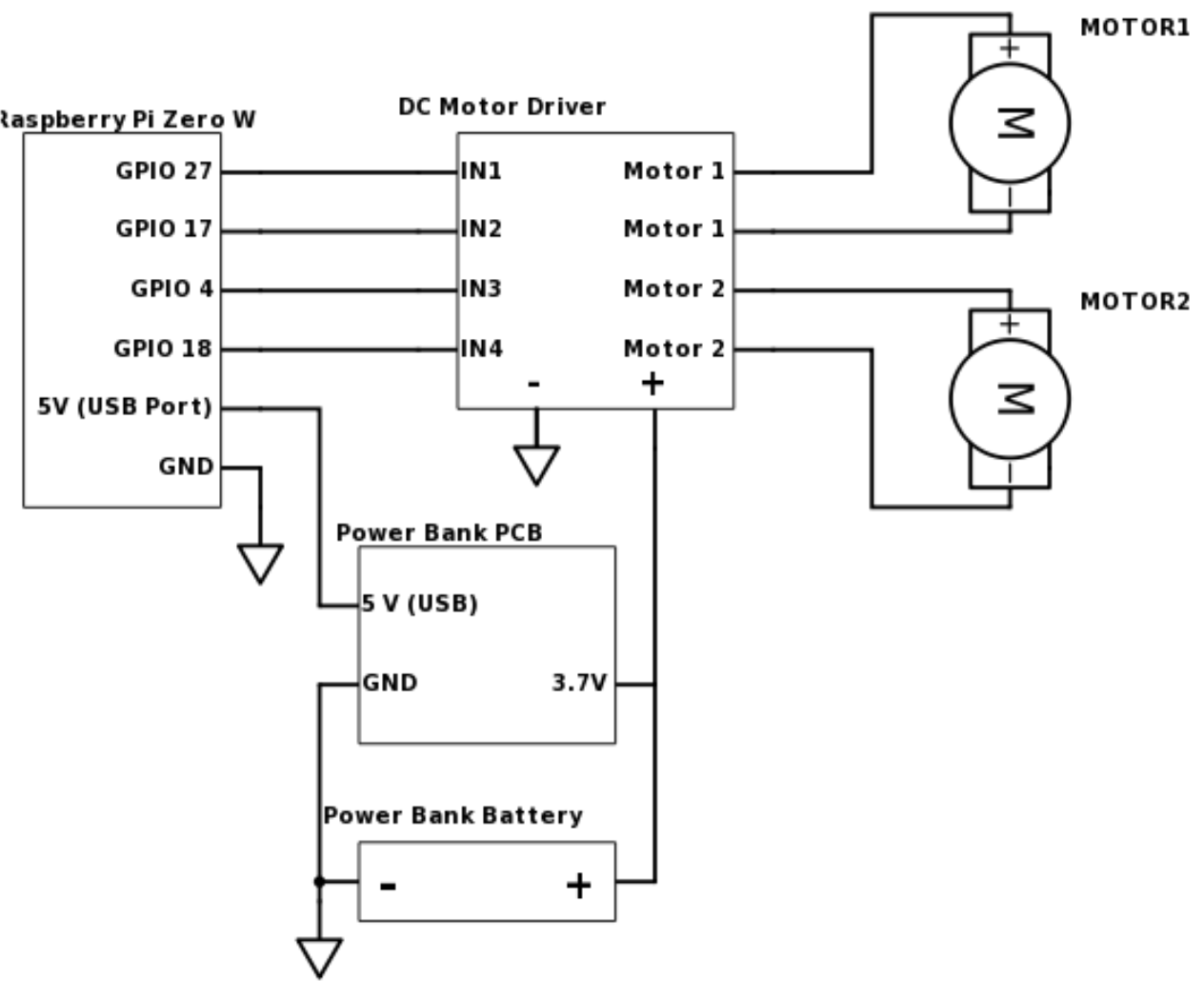 ブレッドボードやジャンパーピンで回路を繋ぎ タミヤ製品を使いながら適当にハードを完成させます。 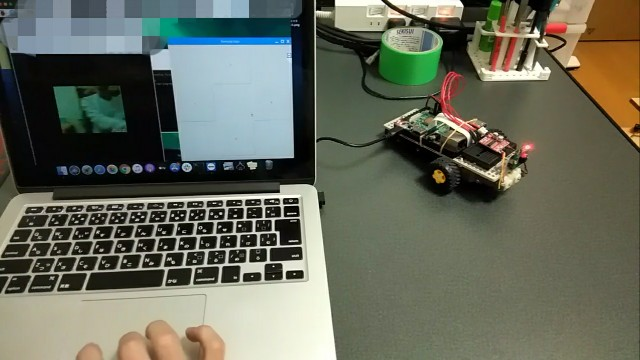 そしてロボット駆動用のGUIを作ります。 Tkinter を使い4つのボタンを配置。 > 電卓のレイアウトを作成する - Narito Blog https://blog.narito.ninja/detail/7/ 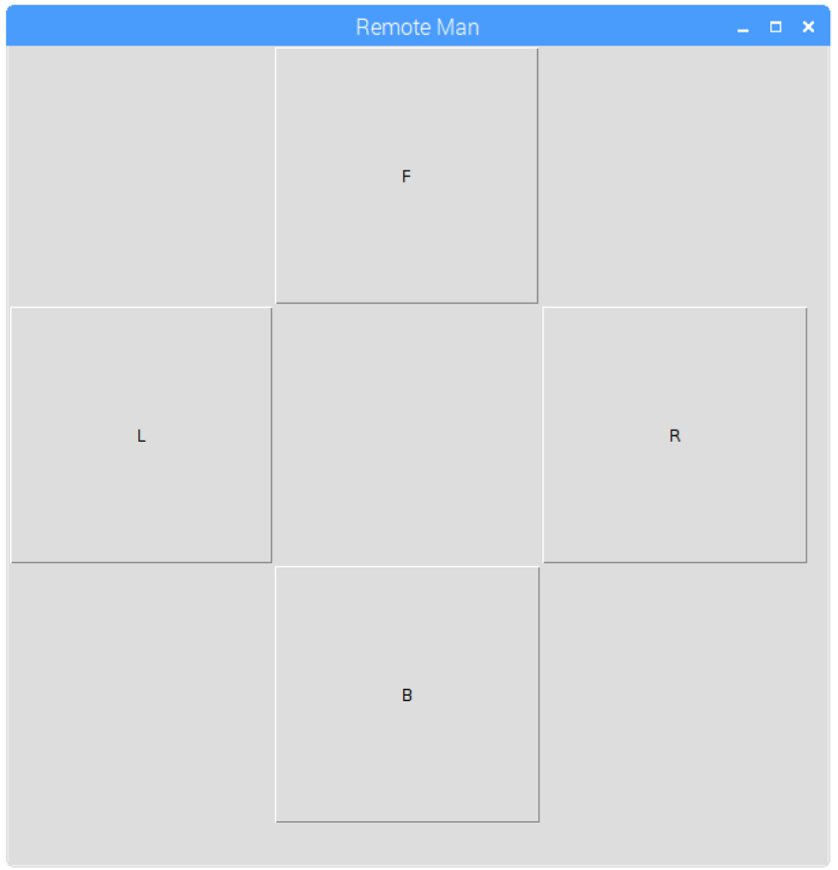 そしてそれぞれ呼び出す関数を定義しGPIOピンを直接制御します。 > Raspberry Pi のGPIOをPythonから利用する - Qiita https://qiita.com/maoutokagura/items/9aef5e23167ce2bc1d10?fbclid=IwAR0H__vd6jee_j0pSPdWQLhDkL0S9QpkfjnuCcPgngTx-IEWZ9Wh5pHAy_I こちらが最終的なプログラムです。 https://github.com/Myaon/AlternationRobot/blob/master/gui_app.py 最後にストリーミング。Motionとgui_app.pyを並列実行させます。 > Raspberry Piと動画モニタアプリMotionで、晩ご飯作成風景を家庭内ストリーミング配信する - Qiita https://qiita.com/yamasaki1ma/items/20fcb55f06d20e5ebb44?fbclid=IwAR0JXRWJnkuqD6AsHB4QqhXdHnFaYHW2WL_COoyToBrDk2BMx0gV-rZYiN8 ラズパイのストリーミング配信をラズパイ上で表示させながら操作するという、仕組みとしては頭の悪そうな事をしています。ここはぜひより良い方法を探して教えて下さいますようお願いしておきます。 追伸:完成した分身ロボットシステムで東京から山口にあるロボットを動かすといったことにも成功しました。