


はじめに
クレーンゲームは好きなんだけれど、既存のものは操作を X, Y 方向のボタンを押すだけのオートマチックで、動作もゆっくりしているところが不満。建機は操縦桿がたくさんあって、それを両手で操って、動きもきびきびしたのが好み。だけど、そんなのない。「ないなら作ってしまえ」と軽い気持ちで作り始めたのだけど、理論的にはできるはずなのに、作ってみると問題発生、仕様変更、代替案の実装のループが続く。はたして、完成できるのか...
材料
材料表
フレーム
| Item | Size | Qty | Remarks |
|---|---|---|---|
| V-Slot 2020 レール | 500mm | 8 | ヘッダー3 |
| V-Slot 2040 レール | 500mm | 4 | ヘッダー3 |
| V-Slot 2040 レール | 550mm | 2 | ヘッダー3 |
駆動系
| Item | Model | Qty | Remarks |
|---|---|---|---|
| バイポーラステッピングモーター | 17HD48002H-22B | 4 | X軸:2, Y軸:1, Z軸:1 |
| タイミングベルト | 5mm | 3 | X軸, Y軸左, Y軸右 |
| リードスクリュー | 250mm | 1 | Z軸 |
| サーボモーター | MG-90S | 3 | アーム |
コントローラ
| Item | Model | Qty | Remarks |
|---|---|---|---|
| マイコン | PIC 16F18857 | 3 | |
| ドライバー | AE-L6470 | 3 | L6470 実装 |
| サーボテスター | 1 | サーボモーター制御に流用 |
表示系
| Item | Model | Qty | Remarks |
|---|---|---|---|
| LCD | 1 | 秋月電子 |
操作卓
| Item | 用途、材料 | Remarks |
|---|---|---|
| ジョイスティック 1 | X,Y軸 | 500mm |
| ジョイスティック 2 | Z軸 | 500mm |
| レバー | アーム開閉 | 自作 |
| 操作卓 | 杉材+L金具 | 自作 |
ワイヤ, コネクタ
| --- | --- | --- |
|---|---|---|
| AWG28, AWG22 | ||
| Dupont コネクタ | ||
| XH コネクタ |
電源
| --- | --- | --- |
|---|---|---|
| DC3.3V 低電圧レギュレータ + DCジャック DIP 化キット | --- | --- |
| DCジャック DIP 化キット、DC6V x2 | --- | --- |
| DCジャック DIP 化キット、DC12V | --- | --- |
| スイッチング AC アダプター | --- | --- |
その他
| --- | --- | --- |
|---|---|---|
| Limit switch | Sodial | |
| Limit switch マウントと対向プレス | 3D printer で自作 | |
| アーム | 透明アクリル板から切り出し | |
| アームベッド | 透明アクリル板から切り出し | |
| アームベッドマウント | 透明アクリル板から切り出し | |
| Y軸マウント | アクリル板をホールソーで加工 | |
| ワイヤーカバー |
材料説明
組み立て
フレーム
2020, 2040 V-Slot レールを一辺 500mm の直方体に組み立てる。
向かって左右方向をX、奥行き方向をY、垂直方向をZ として、左右の Y方向のレール上にそれぞれホイール付きのガントリープレートを取り付ける。それらをX方向に別の V-Slot レールで連結し、X軸のガントリープレートを取り付ける。 X方向のレールの両端に取り付けたモーターの軸にプーリーを取り付けて、タイミングベルトでX軸ガントリープレートを移動させる。
X 軸ガントリープレートには、Z軸 のシャフト(リードスクリュー)を掴んだボールナットを固定する。Z 軸のシャフトの下端にはモーターとクレーンアームとそれを駆動するサーボモーターを取り付けたアームベッドを取り付ける。
駆動系
Y軸左手前にもモーターを設置、、左側モーターからフレーム右側までアルミ棒で連結して、その先にベアリングとプーリーを取り付けて、左右両方からY方向レール上のガントリープレートを駆動する。
Z軸については、X方向レール上のガントリープレートには垂直方向に一条ねじを切ったシャフト(リードスクリュー)をボールナットを介して取付け、シャフトはモーターで直接回転できるようにする。
Z軸モーターには、3個のサーボモーターを取り付けたアームベッドを取り付ける。
サーボモータのホーンにアクリル板にて作成したアームを取り付ける。
https://res.cloudinary.com/elchika/image/upload/t_elchika_article_cover/v1/user/dbe0730f-c1e6-4ff3-b8cf-4e1de54530ce/article/a9389f0b-5ae6-47e7-a18e-209c33020d28/g9awegsi9sgvmzchqgit.jpg
制御
X, Y, Z軸はそれぞれ PIC 16F18857 でコントロールする。
PIC の入力はジョイスティックで、これはレバーを四方にリミットスイッチが取り付けられている。レバーを倒すと通電する。Pull up で接続。
PIC の出力は、SPI で L6470 に接続し、ステッピングモーターを制御している。他に I2C で LCD ディスプレイにステータス、座標を表示している。
L6470 では PIC から受信したメッセージに応じてモータの回転方向、スピード、加減速度を指定できる。また、定期的に座標の取得もする。
クレーンアームを動かすサーボモーターは、PWM にてデューティー比を 0% から 20% に変えて動かす。今回はサーボテスターをコントローラーとして流用した。
サーボテスターに自作のレバーを取りつけて、レバーを前後して、アームを開閉するようにした。
https://res.cloudinary.com/elchika/image/upload/t_elchika_article_cover/v1/user/dbe0730f-c1e6-4ff3-b8cf-4e1de54530ce/article/a9389f0b-5ae6-47e7-a18e-209c33020d28/atayvullzylr9wrulwyi.jpg
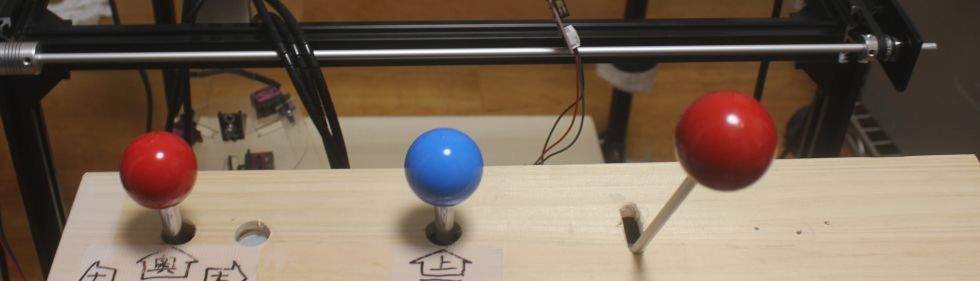
操作方法
電源投入するとゆっくりとモータ-を逆回転させてリミットスイッチが入るところを探す。リミットスイッチが入るを順方向に少し進めて、座標をゼロにセットする。(ホーミング)
https://res.cloudinary.com/elchika/image/upload/t_elchika_article_cover/v1/user/dbe0730f-c1e6-4ff3-b8cf-4e1de54530ce/article/a9389f0b-5ae6-47e7-a18e-209c33020d28/xp3cfqfgsgo2wbauenww.jpg
フレームサイズからあらかじめ計算した範囲にしか進めないので、ホーミング後はガントリープレートがフレーム枠に到達することはない。
左のジョイスティックで X, Y 平面の移動を操作する。斜めに進むことも可能。
中央のジョイスティックで アームの上下を操作する。
右のレバーでアームの開閉を行う。
これらの操作は同時に行うことができるので、アームベッドを降下させながら斜めに進めて、アームを開くことができる。
ステッピングモーターは加速しながらあらかじめ設定した最高速に近づくのでスムーズ。かつ、動きも素早い。当初の目的達成できた。




-
oxox
さんが
2021/02/28
に
編集
をしました。
(メッセージ: 初版)
-
oxox
さんが
2021/02/28
に
編集
をしました。
-
oxox
さんが
2021/02/28
に
編集
をしました。
-
oxox
さんが
2021/02/28
に
編集
をしました。
ログインしてコメントを投稿する