


作りたいもの
知り合いと街中ですれ違った時、軽く手を振る事ってありますよね。
その時こちらが気づくのが遅れて手を振れなかったりすると、ちょっと気まずい。
そんな時にさりげなく知らせてくれる、そんなロボを作りたいと思いました。
ロボの動きとユーザーへのインタラクション
ロボは車のダッシュボードの上に置いておき、常に前方を見ているものとします。
ロボは前走車、もしくは対向車のナンバープレートを読み込み、あらかじめ入力しておいた知り合いの車のナンバープレートと照合します。
照合の結果、知り合いと一致したらロボが運転者に対して何等かのアクション(手を振る、こちらを見つめてくる など)を行ないます。
アクションは知り合いのレア度(久しぶり、遠くに住んでる、など)によってそのバリエーションが変わり、レア度マックスの時はマックスの喜び方を見せてくれます。
それらの動きにより運転手は知り合いが近くにいる事を感知することができ、適切なアクション(手を振るや歓喜など)を取る事ができます。
どうやって作るか
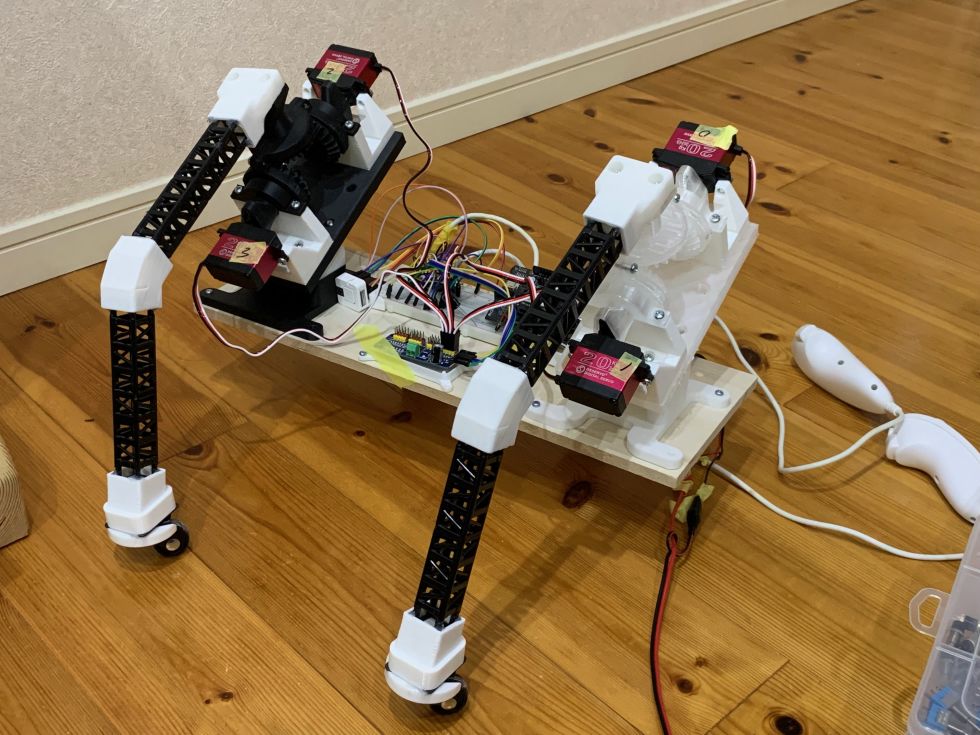
ハード構成
基本的にはSPRESENSEの標準的な構成を使用していきます。
今後スマホ連携などを行なっていく時には適宜M5Stackなどのwifi/blutooth 対応デバイスをつないでいくこととします。
ハードの動き
ハード的には外部から電源を受け取り、カメラで撮影、認識結果に応じてサーボ(ロボの腕)を動かす、という事をしていきます。
ハードウェア的にはかなり少ない構成です。
液晶モニタは現在の状況、読み取ったナンバーの表示、などでバッグ情報に近いものを垂れ流しにします。
(ユーザーへのインタラクションには使用しません)
ソフト
Arduino IDEを使って開発を進めていきます。
(SONYのSDK、VS code は使用しません)
また、SPRESENSEのカメラ画像による学習などはNural Network console を使用して学習済みモデルの作成・取り込みを行なっていきます。
このあたりの使い方はSONY公式がYoutube で出している動画を見ながら進めていきます。
ソフトの動き
カメラ画像を定期的に取り込み、その都度ナンバープレートの文字を読み取ります。
事前に入力されている知り合いのナンバープレート情報と照合し、一致した場合にサーボを駆動させます。
もし時間が許せばGPS信号の取り込みとあわせて、事前に知り合いの出没地域をナンバーと登録しておくことで、変わった場所で見つけた!などを判定できるようにしたいと思います。
作成物
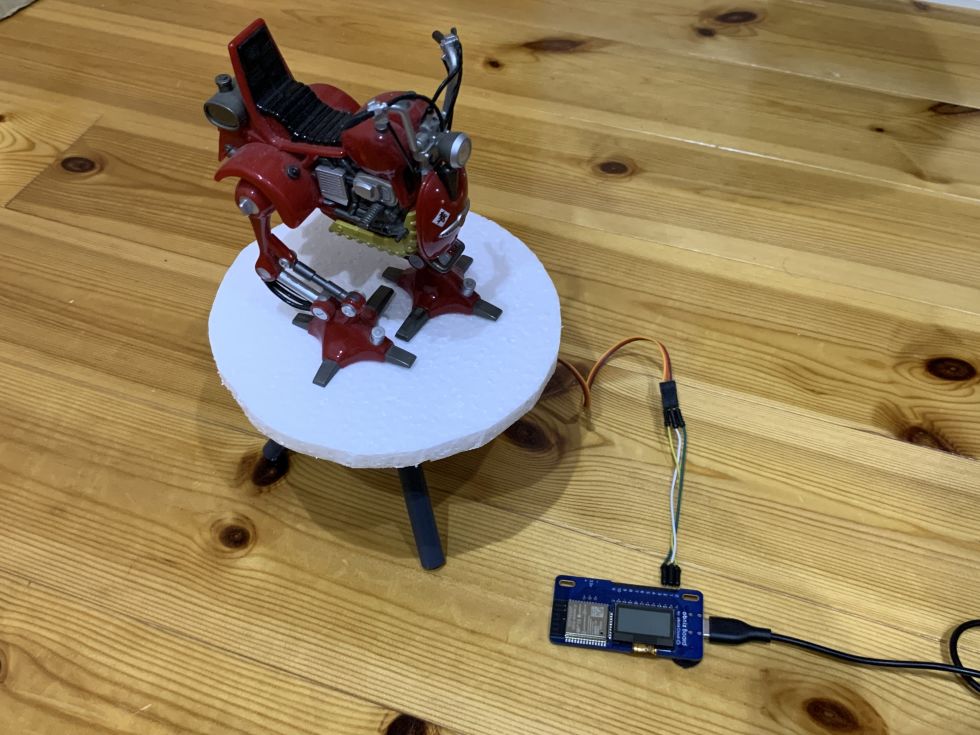
外観
作成したロボの外観・動作は以下の通りです。
ダッシュボードに置く事を想定しているので、あまり大きくしすぎず、目にはつきやすいが邪魔しない、を狙います。
が、ロボのモデリングなどをしている時間とれず・・・。その辺のスクラップからロボが錬成されました。
動作
コード
タイトル
/*
* Spresense_gnss_simple.ino - Simplified gnss example application
* Copyright 2019-2021 Sony Semiconductor Solutions Corporation
*
* This library is free software; you can redistribute it and/or
* modify it under the terms of the GNU Lesser General Public
* License as published by the Free Software Foundation; either
* version 2.1 of the License, or (at your option) any later version.
*
* This library is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
* Lesser General Public License for more details.
*
* You should have received a copy of the GNU Lesser General Public
* License along with this library; if not, write to the Free Software
* Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
*/
#include <Camera.h>
#include <SPI.h>
#include <EEPROM.h>
#include <DNNRT.h>
#include "Adafruit_ILI9341.h"
#include <Servo.h>
#include <SDHCI.h>
SDClass theSD;
/* LCD Settings */
#define TFT_RST 8
#define TFT_DC 9
#define TFT_CS 10
#define DNN_IMG_W 28
#define DNN_IMG_H 28
#define CAM_IMG_W 320
#define CAM_IMG_H 240
#define CAM_CLIP_X 104
#define CAM_CLIP_Y 0
#define CAM_CLIP_W 112
#define CAM_CLIP_H 224
#define LINE_THICKNESS 5
#include <Servo.h>
Servo myservo;
const int SV_PIN = 1;
Adafruit_ILI9341 tft = Adafruit_ILI9341(&SPI, TFT_DC, TFT_CS, TFT_RST);
uint8_t buf[DNN_IMG_W*DNN_IMG_H];
DNNRT dnnrt;
DNNVariable input(DNN_IMG_W*DNN_IMG_H);
static uint8_t const label[11] = {0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10};
void otefuri (int ind){
myservo.write(90); // サーボモーターを0度の位置まで動かす
delay(1000);
myservo.write(90+9*ind); // サーボモーターを0度の位置まで動かす
delay(1000);
myservo.write(90-9*ind); // サーボモーターを0度の位置まで動かす
delay(1000);
myservo.write(90); // サーボモーターを0度の位置まで動かす
delay(1000);
myservo.write(90+9*ind); // サーボモーターを0度の位置まで動かす
delay(1000);
myservo.write(90-9*ind); // サーボモーターを0度の位置まで動かす
delay(1000);
}
void putStringOnLcd(String str, int color) {
int len = str.length();
tft.fillRect(0,224, 320, 240, ILI9341_BLACK);
tft.setTextSize(2);
int sx = 160 - len/2*12;
if (sx < 0) sx = 0;
tft.setCursor(sx, 225);
tft.setTextColor(color);
tft.println(str);
}
void drawBox(uint16_t* imgBuf) {
/* Draw target line */
for (int x = CAM_CLIP_X; x < CAM_CLIP_X+CAM_CLIP_W; ++x) {
for (int n = 0; n < LINE_THICKNESS; ++n) {
*(imgBuf + CAM_IMG_W*(CAM_CLIP_Y+n) + x) = ILI9341_RED;
*(imgBuf + CAM_IMG_W*(CAM_CLIP_Y+CAM_CLIP_H-1-n) + x) = ILI9341_RED;
}
}
for (int y = CAM_CLIP_Y; y < CAM_CLIP_Y+CAM_CLIP_H; ++y) {
for (int n = 0; n < LINE_THICKNESS; ++n) {
*(imgBuf + CAM_IMG_W*y + CAM_CLIP_X+n) = ILI9341_RED;
*(imgBuf + CAM_IMG_W*y + CAM_CLIP_X + CAM_CLIP_W-1-n) = ILI9341_RED;
}
}
}
void CamCB(CamImage img) {
if (!img.isAvailable()) {
Serial.println("Image is not available. Try again");
return;
}
CamImage small;
CamErr err = img.clipAndResizeImageByHW(small
, CAM_CLIP_X, CAM_CLIP_Y
, CAM_CLIP_X + CAM_CLIP_W -1
, CAM_CLIP_Y + CAM_CLIP_H -1
, DNN_IMG_W, DNN_IMG_H);
if (!small.isAvailable()){
putStringOnLcd("Clip and Reize Error:" + String(err), ILI9341_RED);
return;
}
small.convertPixFormat(CAM_IMAGE_PIX_FMT_RGB565);
uint16_t* tmp = (uint16_t*)small.getImgBuff();
float *dnnbuf = input.data();
float f_max = 0.0;
for (int n = 0; n < DNN_IMG_H*DNN_IMG_W; ++n) {
dnnbuf[n] = (float)((tmp[n] & 0x07E0) >> 5);
if (dnnbuf[n] > f_max) f_max = dnnbuf[n];
}
/* normalization */
for (int n = 0; n < DNN_IMG_W*DNN_IMG_H; ++n) {
dnnbuf[n] /= f_max;
}
String gStrResult = "?";
dnnrt.inputVariable(input, 0);
dnnrt.forward();
DNNVariable output = dnnrt.outputVariable(0);
int index = output.maxIndex();
if (index < 10) {
gStrResult = String(label[index]) + String(":") + String(output[index]);
otefuri(index);
} else {
gStrResult = String("?:") + String(output[index]);
}
Serial.println(gStrResult);
img.convertPixFormat(CAM_IMAGE_PIX_FMT_RGB565);
uint16_t* imgBuf = (uint16_t*)img.getImgBuff();
drawBox(imgBuf);
tft.drawRGBBitmap(0, 0, (uint16_t *)img.getImgBuff(), 320, 224);
putStringOnLcd(gStrResult, ILI9341_YELLOW);
}
void setup() {
myservo.attach(SV_PIN, 700, 2200);
Serial.begin(115200);
tft.begin();
tft.setRotation(3);
while (!theSD.begin()) { putStringOnLcd("Insert SD card", ILI9341_RED); }
File nnbfile = theSD.open("model.nnb");
int ret = dnnrt.begin(nnbfile);
if (ret < 0) {
putStringOnLcd("dnnrt.begin failed" + String(ret), ILI9341_RED);
return;
}
theCamera.begin();
theCamera.startStreaming(true, CamCB);
}
void loop() {
myservo.write(0); // サーボモーターを0度の位置まで動かす
}あとがき
実は今回はSPRESENSEコンテストとしては2回目の参加となります。
1回目の参加の時はROHM社のWIFIを使ったスマートメーターからの電力読み取り、およびEへの充電ポートへのコネクタ接続、といったものを作成しようとしたのですが、スマートメーターのプロトコルの理解に激しく時間を持っていかれあえなく途中で断念・・・。
今回はそのリベンジ、という事でNural network console を使ったAI処理にチャレンジする、を題材としました。
実際に使ってみて、これはかなり気軽に使えそうという感触を得ましたので、今後も公私ともに取り入れていきたいと思います。

投稿者の人気記事



-
84mot
さんが
2025/01/31
に
編集
をしました。
(メッセージ: 初版)
-
84mot
さんが
2025/01/31
に
編集
をしました。
ログインしてコメントを投稿する