


-
概要
本記事では、カメラ・エッジAI・BLE通信を搭載したドローンを用いたインフラ点検システムの試作について紹介する。
対象はトンネルや水道管といった閉鎖・狭小空間インフラであり、機体側でひび割れ(Crack)を自動検出し、必要な情報のみを保存・送信することを目的としている。
1.1.ゴール
本試作のゴールは以下の3点である。
○ドローン搭載カメラ画像から、ひび割れを機体側で検出できること
○Spresenseクラスのマイコンで動作可能な軽量処理であること
○「なぜその判定になったか」を説明可能なAI構成であること -
課題背景
2.1.インフラ点検の制約
トンネルや水道管といったインフラ設備の点検には、以下の制約が存在する。
○通信環境が不安定、または存在しない
○人が立ち入るには危険・コストが高い
○点検対象が長距離・広範囲に及ぶ
このため、近年はドローンやロボットによる点検が注目されている。
2.2.機体側で判断する意義
しかし多くのドローン点検は、「とりあえず撮影 → 全画像を送信 → 人が確認」という構成に留まっている。
2.3.今回の記事の位置づけ
ドローンは単なる飛行カメラではなく、現場で考える自律判断型ロボットへ進化すべき -
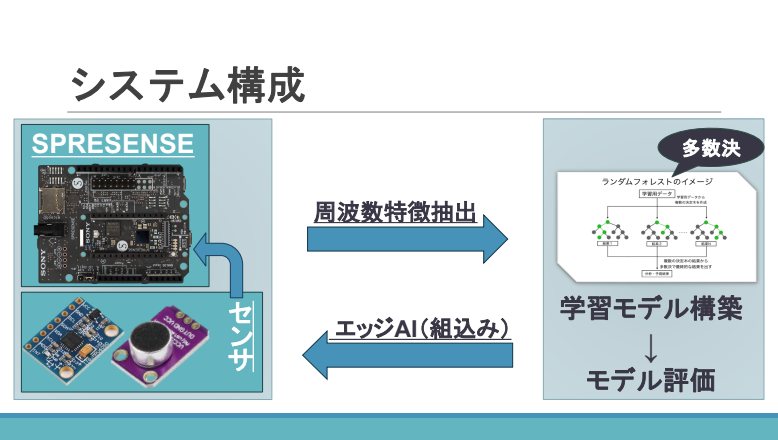
構成
3.1.ハードウェア構成
ドローン(100g未満クラス)
Sony Spresense
Spresense Camera
BLE(BLE1507)
microSD
モバイルバッテリー給電
本記事では、IMUや位置推定は未実装とし、画像AIの検証にフォーカスしている。
3.2.保存と送信の最小単位
本構成では、
通常時:画像は破棄
異常検出時:画像、スコア、時刻のみを保存・送信する。
3.3.位置表現とIMU導入の段階
将来的にはIMUを用い、入口からの距離や区間IDといった1次元参照系で位置を表現する想定である。 -
要素
4.1.入力データ
路面・壁面の実写画像
ひび割れあり/なし
(解像度統一済み)
4.2.中間生成物
Thin Candidate(二値化細線画像)を可視化することで、AIが何を見て判断しているかを確認
4.3.出力画像
score(連続値)
pred(CRACK / NO-CRACK) -
実現のための工夫
5.1.TrueがCRACKになりやすい問題
単純な画像分類では、テクスチャや継ぎ目、影などがひび割れと誤認されやすい。
5.2.長く細い線だけを評価する
「割れ単体」ではなく「連続している」や「割れの特長」などの特性を学習させた
5.3.スコアの作り方としきい値
Thin Candidate に含まれる画素量を正規化し、スコアとして算出する。
5.4.見落とし対策の考え方
見落としを減らすため、閾値は低めに設定し誤検出は後段で整理という思想を取っている。 -
導入検証
6.1.実行環境
Python(学習・検証)
Spresense実装を想定した軽量処理
6.2.実行手順
学習データ:300枚
テストデータ:100枚
(CRACK / NO-CRACK 均等)
6.3.結果
以下は代表例である。
CRACK画像
score = 0.002167 → CRACK
NO-CRACK画像
score = 0.000389 → NO-CRACK
score = 0.000151 → NO-CRACK
score = 0.000108 → NO-CRACK
ひび割れに沿ってHeatmapが反応し、
細線のみが抽出されていることを確認できた。
-
まとめ
AIを載せること自体よりも、どこで判断し、何を残し、何を捨てるかを考えることが重要だと感じている。
本記事が、エッジAI × ハードウェア × 社会実装に興味を持つ方の参考になれば幸いである。
以下参考のためにAIの判定過程の画像も添付しておきます。
投稿者の人気記事




-
kd_yuta
さんが
2026/01/31
に
編集
をしました。
(メッセージ: 初版)
-
kd_yuta
さんが
2026/01/31
に
編集
をしました。
ログインしてコメントを投稿する