 製作品
製作品  2051
2051MQTTとCo2センサ、温度・湿度・気圧センサを使用した部屋状況配信システム
はじめに
以前から部屋の温度や湿度、Co2濃度観測するもの作成したいと思っていました。ただ、コンソールで出力するのではあまりおもしろくないので、MQTTを使用してネットワークに定期的にセンサの状態を配信するようにしてみました。
構成
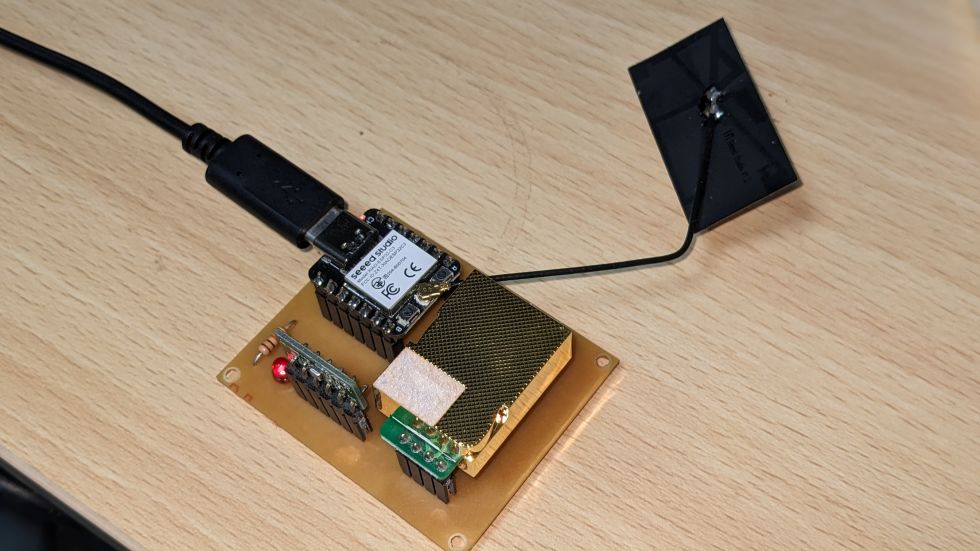
今回はマイコンにSeeed Xiao ESP32Cを使用しました。データの配信にはMQTTを使用して配信をしています。MQTTのBrokerには、Mosquittoを使用しています。Mosquittoは公開サーバを使用せず、ローカルでサーバを立ち上げテストをしています。Mosquittoのインストールや稼働についてはインターネットに情報がたくさんあるので調べてみてください。
使用部品
使用部品は下の表に示す部品を使用しました。
| 使用部品 | 型名 | 備考 |
|---|---|---|
| マイコン | Seeed Xiao ESP32C | 秋月電子で購入 |
| 温度・湿度・気圧センサ | BME280 | 秋月電子で購入 |
| 二酸化炭素濃度センサ | MHZ-19C | 秋月電子で購入 |
回路図
下の図は今回の回路図になります。BME280はI2CでMHZ-19CはUARTで通信を行い、データを取得しています。
プログラムについて
マイコン側については、ネットワークでデータを配信すること、手早く作成することを目標としたので、Micro Pythonを使用して作成しました。また、購読側は 、Golangを使用して作成しました。
配信側側のプログラム
センサデータを配信するマイコンのプログラムはMicropythonを使用しています。BME280のセンサの取得はこちらのサイトを利用しました。
main.py
import time
import ujson as json
from umqtt.simple import MQTTClient
from machine import Pin
from machine import I2C
from sensor.bme280 import BME280
from sensor.mhz_19c import mhz19C
if __name__ == "__main__":
led = Pin(2,Pin.OUT)
i2c = I2C(0, scl=Pin(7), sda=Pin(6), freq=10000)
sensor = mhz19C()
bme = BME280(i2c=i2c)
c = MQTTClient("umqtt_client", "<Brokerのアドレス>", port=<ポート番号>)
while True:
c.connect()
led.off()
ppm = sensor.getdata()
temp = bme.temperature
hum = bme.humidity
press = bme.pressure
if ppm is None:
print('Data None')
ppm = 9999
else:
print(ppm, end='[ppm]\n')
print(temp,end='[℃]\n')
print(hum,end='[%]\n')
print(press,end='[hPa]\n')
d = {'temp': temp, 'hum': hum, 'press':press}
data = {'co2': ppm, 'bme280': d}
c.publish("test/sensor", json.dumps(data))
c.disconnect()
time.sleep(1)
led.on()
time.sleep(1)bme280.py
import time
# BME280 default address.
BME280_I2CADDR = 0x76
# Operating Modes
BME280_OSAMPLE_1 = 1
BME280_OSAMPLE_2 = 2
BME280_OSAMPLE_4 = 3
BME280_OSAMPLE_8 = 4
BME280_OSAMPLE_16 = 5
# BME280 Registers
BME280_REGISTER_DIG_T1 = 0x88 # Trimming parameter registers
BME280_REGISTER_DIG_T2 = 0x8A
BME280_REGISTER_DIG_T3 = 0x8C
BME280_REGISTER_DIG_P1 = 0x8E
BME280_REGISTER_DIG_P2 = 0x90
BME280_REGISTER_DIG_P3 = 0x92
BME280_REGISTER_DIG_P4 = 0x94
BME280_REGISTER_DIG_P5 = 0x96
BME280_REGISTER_DIG_P6 = 0x98
BME280_REGISTER_DIG_P7 = 0x9A
BME280_REGISTER_DIG_P8 = 0x9C
BME280_REGISTER_DIG_P9 = 0x9E
BME280_REGISTER_DIG_H1 = 0xA1
BME280_REGISTER_DIG_H2 = 0xE1
BME280_REGISTER_DIG_H3 = 0xE3
BME280_REGISTER_DIG_H4 = 0xE4
BME280_REGISTER_DIG_H5 = 0xE5
BME280_REGISTER_DIG_H6 = 0xE6
BME280_REGISTER_DIG_H7 = 0xE7
BME280_REGISTER_CHIPID = 0xD0
BME280_REGISTER_VERSION = 0xD1
BME280_REGISTER_SOFTRESET = 0xE0
BME280_REGISTER_CONTROL_HUM = 0xF2
BME280_REGISTER_CONTROL = 0xF4
BME280_REGISTER_CONFIG = 0xF5
BME280_REGISTER_PRESSURE_DATA = 0xF7
BME280_REGISTER_TEMP_DATA = 0xFA
BME280_REGISTER_HUMIDITY_DATA = 0xFD
class Device:
"""Class for communicating with an I2C device.
Allows reading and writing 8-bit, 16-bit, and byte array values to
registers on the device."""
def __init__(self, address, i2c):
"""Create an instance of the I2C device at the specified address using
the specified I2C interface object."""
self._address = address
self._i2c = i2c
def writeRaw8(self, value):
"""Write an 8-bit value on the bus (without register)."""
value = value & 0xFF
self._i2c.writeto(self._address, value)
def write8(self, register, value):
"""Write an 8-bit value to the specified register."""
b = bytearray(1)
b[0] = value & 0xFF
self._i2c.writeto_mem(self._address, register, b)
def write16(self, register, value):
"""Write a 16-bit value to the specified register."""
value = value & 0xFFFF
b = bytearray(2)
b[0] = value & 0xFF
b[1] = (value >> 8) & 0xFF
self._i2c.writeto_mem(self._address, register, value)
def readRaw8(self):
"""Read an 8-bit value on the bus (without register)."""
return int.from_bytes(self._i2c.readfrom(self._address, 1), 'little') & 0xFF
def readU8(self, register):
"""Read an unsigned byte from the specified register."""
return int.from_bytes(
self._i2c.readfrom_mem(self._address, register, 1), 'little') & 0xFF
def readS8(self, register):
"""Read a signed byte from the specified register."""
result = self.readU8(register)
if result > 127:
result -= 256
return result
def readU16(self, register, little_endian=True):
result = int.from_bytes(
self._i2c.readfrom_mem(self._address, register, 2), 'little') & 0xFFFF
if not little_endian:
result = ((result << 8) & 0xFF00) + (result >> 8)
return result
def readS16(self, register, little_endian=True):
"""Read a signed 16-bit value from the specified register, with the
specified endianness (default little endian, or least significant byte
first)."""
result = self.readU16(register, little_endian)
if result > 32767:
result -= 65536
return result
def readU16LE(self, register):
"""Read an unsigned 16-bit value from the specified register, in little
endian byte order."""
return self.readU16(register, little_endian=True)
def readU16BE(self, register):
"""Read an unsigned 16-bit value from the specified register, in big
endian byte order."""
return self.readU16(register, little_endian=False)
def readS16LE(self, register):
"""Read a signed 16-bit value from the specified register, in little
endian byte order."""
return self.readS16(register, little_endian=True)
def readS16BE(self, register):
"""Read a signed 16-bit value from the specified register, in big
endian byte order."""
return self.readS16(register, little_endian=False)
class BME280:
def __init__(self, mode=BME280_OSAMPLE_1, address=BME280_I2CADDR, i2c=None,
**kwargs):
# Check that mode is valid.
if mode not in [BME280_OSAMPLE_1, BME280_OSAMPLE_2, BME280_OSAMPLE_4,
BME280_OSAMPLE_8, BME280_OSAMPLE_16]:
raise ValueError(
'Unexpected mode value {0}. Set mode to one of '
'BME280_ULTRALOWPOWER, BME280_STANDARD, BME280_HIGHRES, or '
'BME280_ULTRAHIGHRES'.format(mode))
self._mode = mode
# Create I2C device.
if i2c is None:
raise ValueError('An I2C object is required.')
self._device = Device(address, i2c)
# Load calibration values.
self._load_calibration()
self._device.write8(BME280_REGISTER_CONTROL, 0x3F)
self.t_fine = 0
def _load_calibration(self):
self.dig_T1 = self._device.readU16LE(BME280_REGISTER_DIG_T1)
self.dig_T2 = self._device.readS16LE(BME280_REGISTER_DIG_T2)
self.dig_T3 = self._device.readS16LE(BME280_REGISTER_DIG_T3)
self.dig_P1 = self._device.readU16LE(BME280_REGISTER_DIG_P1)
self.dig_P2 = self._device.readS16LE(BME280_REGISTER_DIG_P2)
self.dig_P3 = self._device.readS16LE(BME280_REGISTER_DIG_P3)
self.dig_P4 = self._device.readS16LE(BME280_REGISTER_DIG_P4)
self.dig_P5 = self._device.readS16LE(BME280_REGISTER_DIG_P5)
self.dig_P6 = self._device.readS16LE(BME280_REGISTER_DIG_P6)
self.dig_P7 = self._device.readS16LE(BME280_REGISTER_DIG_P7)
self.dig_P8 = self._device.readS16LE(BME280_REGISTER_DIG_P8)
self.dig_P9 = self._device.readS16LE(BME280_REGISTER_DIG_P9)
self.dig_H1 = self._device.readU8(BME280_REGISTER_DIG_H1)
self.dig_H2 = self._device.readS16LE(BME280_REGISTER_DIG_H2)
self.dig_H3 = self._device.readU8(BME280_REGISTER_DIG_H3)
self.dig_H6 = self._device.readS8(BME280_REGISTER_DIG_H7)
h4 = self._device.readS8(BME280_REGISTER_DIG_H4)
h4 = (h4 << 24) >> 20
self.dig_H4 = h4 | (self._device.readU8(BME280_REGISTER_DIG_H5) & 0x0F)
h5 = self._device.readS8(BME280_REGISTER_DIG_H6)
h5 = (h5 << 24) >> 20
self.dig_H5 = h5 | (
self._device.readU8(BME280_REGISTER_DIG_H5) >> 4 & 0x0F)
def read_raw_temp(self):
"""Reads the raw (uncompensated) temperature from the sensor."""
meas = self._mode
self._device.write8(BME280_REGISTER_CONTROL_HUM, meas)
meas = self._mode << 5 | self._mode << 2 | 1
self._device.write8(BME280_REGISTER_CONTROL, meas)
sleep_time = 1250 + 2300 * (1 << self._mode)
sleep_time = sleep_time + 2300 * (1 << self._mode) + 575
sleep_time = sleep_time + 2300 * (1 << self._mode) + 575
time.sleep_us(sleep_time) # Wait the required time
msb = self._device.readU8(BME280_REGISTER_TEMP_DATA)
lsb = self._device.readU8(BME280_REGISTER_TEMP_DATA + 1)
xlsb = self._device.readU8(BME280_REGISTER_TEMP_DATA + 2)
raw = ((msb << 16) | (lsb << 8) | xlsb) >> 4
return raw
def read_raw_pressure(self):
"""Reads the raw (uncompensated) pressure level from the sensor."""
"""Assumes that the temperature has already been read """
"""i.e. that enough delay has been provided"""
msb = self._device.readU8(BME280_REGISTER_PRESSURE_DATA)
lsb = self._device.readU8(BME280_REGISTER_PRESSURE_DATA + 1)
xlsb = self._device.readU8(BME280_REGISTER_PRESSURE_DATA + 2)
raw = ((msb << 16) | (lsb << 8) | xlsb) >> 4
return raw
def read_raw_humidity(self):
"""Assumes that the temperature has already been read """
"""i.e. that enough delay has been provided"""
msb = self._device.readU8(BME280_REGISTER_HUMIDITY_DATA)
lsb = self._device.readU8(BME280_REGISTER_HUMIDITY_DATA + 1)
raw = (msb << 8) | lsb
return raw
def read_temperature(self):
"""Get the compensated temperature in 0.01 of a degree celsius."""
adc = self.read_raw_temp()
var1 = ((adc >> 3) - (self.dig_T1 << 1)) * (self.dig_T2 >> 11)
var2 = ((
(((adc >> 4) - self.dig_T1) * ((adc >> 4) - self.dig_T1)) >> 12) *
self.dig_T3) >> 14
self.t_fine = var1 + var2
return (self.t_fine * 5 + 128) >> 8
def read_pressure(self):
"""Gets the compensated pressure in Pascals."""
adc = self.read_raw_pressure()
var1 = self.t_fine - 128000
var2 = var1 * var1 * self.dig_P6
var2 = var2 + ((var1 * self.dig_P5) << 17)
var2 = var2 + (self.dig_P4 << 35)
var1 = (((var1 * var1 * self.dig_P3) >> 8) +
((var1 * self.dig_P2) >> 12))
var1 = (((1 << 47) + var1) * self.dig_P1) >> 33
if var1 == 0:
return 0
p = 1048576 - adc
p = (((p << 31) - var2) * 3125) // var1
var1 = (self.dig_P9 * (p >> 13) * (p >> 13)) >> 25
var2 = (self.dig_P8 * p) >> 19
return ((p + var1 + var2) >> 8) + (self.dig_P7 << 4)
def read_humidity(self):
adc = self.read_raw_humidity()
# print 'Raw humidity = {0:d}'.format (adc)
h = self.t_fine - 76800
h = (((((adc << 14) - (self.dig_H4 << 20) - (self.dig_H5 * h)) +
16384) >> 15) * (((((((h * self.dig_H6) >> 10) * (((h *
self.dig_H3) >> 11) + 32768)) >> 10) + 2097152) *
self.dig_H2 + 8192) >> 14))
h = h - (((((h >> 15) * (h >> 15)) >> 7) * self.dig_H1) >> 4)
h = 0 if h < 0 else h
h = 419430400 if h > 419430400 else h
return h >> 12
@property
def temperature(self):
"""Return the temperature in degrees."""
t = self.read_temperature()
# ti = t // 100
# td = t - ti * 100
return t / 100
# return "{}.{:02d}C".format(ti, td)
@property
def pressure(self):
"Return the temperature in hPa."
p = self.read_pressure() // 256
# pi = p // 100
# pd = p - pi * 100
return p / 100
# return "{}.{:02d}hPa".format(pi, pd)
@property
def humidity(self):
"Return the humidity in percent."
h = self.read_humidity()
# hi = h // 1024
# hd = h * 100 // 1024 - hi * 100
return h / 1024
# return "{}.{:02d}%".format(hi, hd)mhz_19c.py
from machine import UART
class mhz19C:
""" Co2センサーMHZ-19Cクラス """
# コンストラクタ
def __init__(self):
self.uart = UART(1, 9600, 8, None, 1, tx=21, rx=20)
# センサーからのデータ取得
def getdata(self):
cmd = bytearray([0xff, 0x01, 0x86, 0x00, 0x00, 0x00, 0x00, 0x00, 0x79])
self.uart.write(cmd)
if self.uart.any():
data = self.uart.read()
ppm = int.from_bytes(data[2:4], "big")
return ppm購読側のプログラム
購読側のプログラムです。Publisherで配信されるとデータを受信し、表示します。
購読側のプログラム
package main
import (
"encoding/json"
"fmt"
"log"
"os"
"os/signal"
mqtt "github.com/eclipse/paho.mqtt.golang"
)
type Bme280 struct {
Temp float64 `json:"temp"`
Hum float64 `json:"hum"`
Press float64 `json:"press"`
}
// SendData JSON用構造体
type RecvData struct {
Co2 int `json:"co2"`
Sensor Bme280 `json:"bme280"`
}
// ---------------------------------------------------------------
func main() {
var rData RecvData
//var c Counter
fmt.Fprintf(os.Stderr, "*** 開始 ***\n")
msgCh := make(chan mqtt.Message)
var f mqtt.MessageHandler = func(client mqtt.Client, msg mqtt.Message) {
msgCh <- msg
}
// MQTTブローカに接続
opts := mqtt.NewClientOptions().AddBroker("tcp://<Brokerのアドレス>:<ポート番号>")
cc := mqtt.NewClient(opts)
token := cc.Connect()
if token.Wait() && token.Error() != nil {
log.Fatalf("Mqtt error: %s", token.Error())
}
// Topicを設定
subscribeToken := cc.Subscribe("test/sensor", 0, f)
if subscribeToken.Wait() && subscribeToken.Error() != nil {
log.Fatal(subscribeToken.Error())
}
// OSから割込を検出
signalCh := make(chan os.Signal, 1)
signal.Notify(signalCh, os.Interrupt)
for {
select {
// メッセージ到着
case m := <-msgCh:
// JSONデータをデコードして表示
json.Unmarshal(m.Payload(), &rData)
fmt.Printf("Co2 : %d[ppm]\n", rData.Co2)
fmt.Printf("Temp : %5.2f[℃]\n", rData.Sensor.Temp)
fmt.Printf("Hum : %5.2f[per]\n", rData.Sensor.Hum)
fmt.Printf("Press: %5.2f[hPa]\n", rData.Sensor.Press)
// 終了割込処理
case <-signalCh:
fmt.Printf("Interrupt detected.\n")
cc.Disconnect(1000)
return
}
}
}下の図は実際に動作させて、センサの状態を購読している様子です。
最後に
今回、ESP32CとCo2センサ、温度・湿度・気圧センサを使用してCo2濃度や温度などの部屋の状況を配信するものを製作してみました。MQTTを使えば簡単に配信したり、購読できるので応用の範囲が広がると思います。製作した記事が少しでも参考になれば良いかなぁと思っています。
投稿者の人気記事






-
keiske-hongyo
さんが
2023/04/29
に
編集
をしました。
(メッセージ: 初版)
-
keiske-hongyo
さんが
2023/05/02
に
編集
をしました。
ログインしてコメントを投稿する