


おかめがには、貴方のそばにいます…
ここにも、そこにも…あそこにも!
例えば100円ショップで仮面が気になって、手に取ったりしませんでしたか?
いつのまにかレジに持っていったりしたこと、ありませんか?
ノリで買って被ってみたものの、その後部屋で放置されたりしていませんか?
そんな貴方は、おかめがにを作成することをお勧めします…!
- 必要なもの
おかめの仮面(おかめでなくてもよいですが、顔だけが隠れる大きさが良いです。)
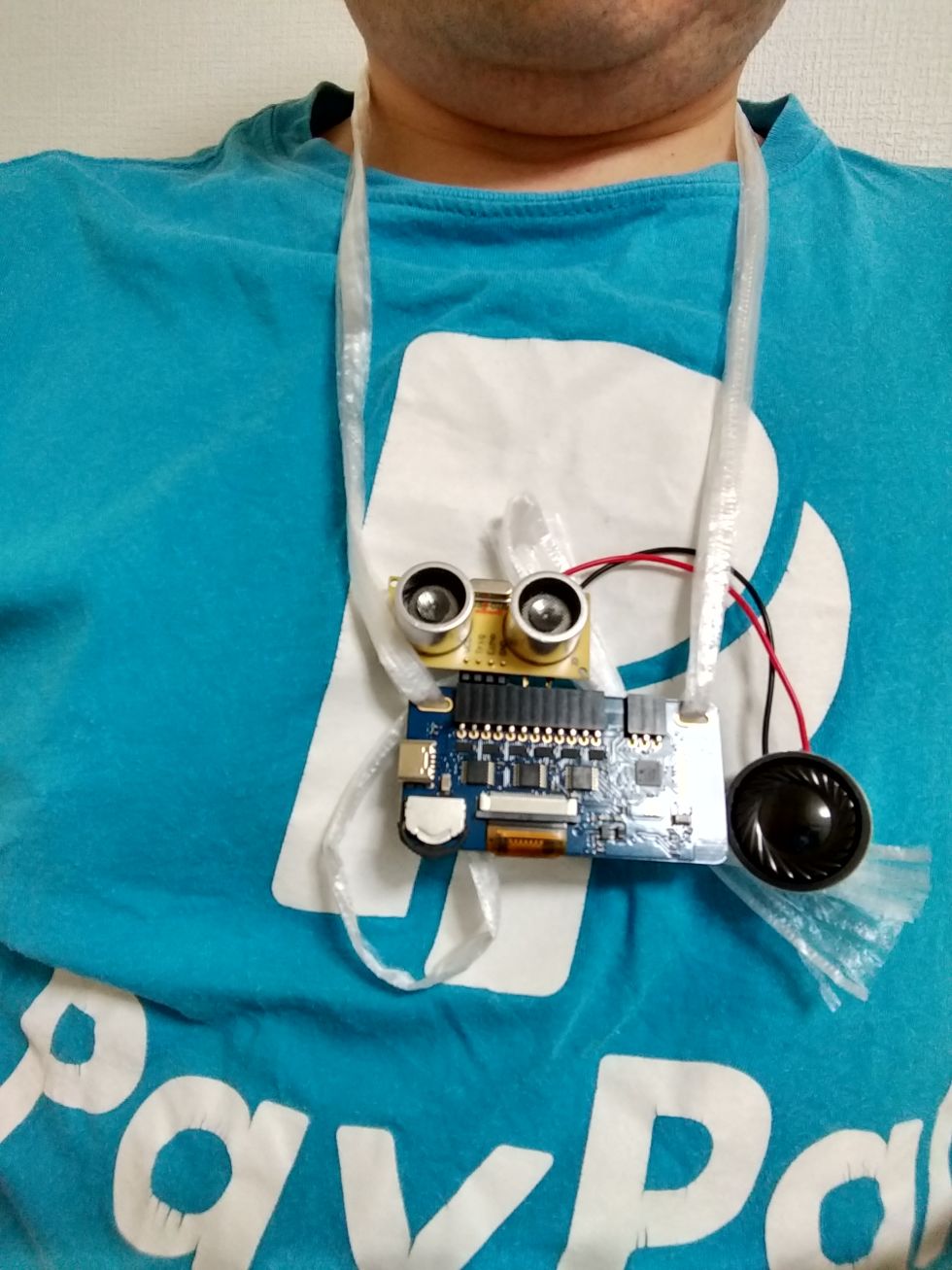
マイコンボード GR-ADZUKI
タミヤ ぷるぷるテントウムシキット
単三電池2本
単三電池2本用電池ボックス
両面テープ
Arduino IDEのインストールされたパソコン
USB to MicroUSBケーブル(充電とデータ転送のできるもの)
作り方
1.タミヤ ぷるぷるテントウムシキットを通常通り作成します。動作することを確認してください。
2.ぷるぷるテントウムシキットの電池ボックスについているリード線2本を外し、GR-ADZUKIのMOTOR0に接続してください。極性はどちらでもかまいません。ぷるぷるテントウムシキットにプラスドライバーが同梱されているので使用すると便利です。
3.GR-ADZUKIのBATTに電池ボックスを接続してください。ここもプラスドライバーを使います。
4.GR-ADZUKIに以下のプログラムを書き込みます。
GRokame01
/* これもコメント */
#include <Arduino.h>
//#include <Servo.h>
const int buttonPin = 2; // ボタン番号
const int photoSense = 16; // 光センサ番号
int buttonState = 0; // ボタン状態
int photoData = 200; // 光センサ状態
const int ledPin = 13; // LED番号
//Servo myservo; // サーボモーターを使用
const int servoPin = 4; // サーボピン番号
const int dcMotorPin0 = 9; // DCモーターの端子番号その1
const int dcMotorPin1 = 10; // DCモーターの端子番号その2
void setup() {
// LEDピンを出力として初期化
pinMode(ledPin, OUTPUT);
// ボタンを入力として初期化
pinMode(buttonPin, INPUT_PULLUP);
pinMode(photoSense, INPUT);
// サーボモーターとサーボピンを関連付ける
//myservo.attach(servoPin);
// サーボモータの初期角度を0度にする
//myservo.write(0);
// DCモーターピンを出力として初期化
pinMode(dcMotorPin0, OUTPUT);
pinMode(dcMotorPin1, OUTPUT);
// DCモーターを停止(両方に同じ値を入れると停止)
analogWrite(dcMotorPin0, 0);
analogWrite(dcMotorPin1, 0);
}
void loop() {
// ボタン状態を読み込む
/* while(photoData = digitalRead(photoSense)){
// ボタンが押されたらループから出る
if (photoData < 1000) {
break;
}
}
*/
photoData = analogRead(photoSense);
// LEDの明るさを0から255まで5ずつ増やす
for(int fadeValue = 0 ; fadeValue <= 255; fadeValue +=5) {
// アナログ値としてLEDの明るさをセットする
analogWrite(ledPin, fadeValue);
// 30ミリ秒待つ
delay(30);
}
// LEDの明るさを255から0まで5ずつ減らす
for(int fadeValue = 255 ; fadeValue >= 0; fadeValue -=5) {
// アナログ値としてLEDの明るさをセットする
analogWrite(ledPin, fadeValue);
// 30ミリ秒待つ
delay(30);
}
// Move servo motor
/* myservo.write(90); // サーボモーターを90度にする
delay(2000); // 2秒待つ
myservo.write(180); // サーボモーターを180度にする
delay(2000); // 2秒待つ
myservo.write(0); // サーボモーターを0度にする
delay(2000); // 2秒待つ
*/
if (photoData < 40){
if (photoData > 0){
// DCモーターを3秒間動かす
analogWrite(dcMotorPin0, 100);
delay(1000);
// DCモーターを止める
analogWrite(dcMotorPin0, 0);
}
}
}5.おかめの仮面を載せて固定します。この時光センサーがおかめの目の部分にて露出するようにします。
これで完成です!手を伸ばすと逃げていき、暗いところで蠢きます。
あなたもこの怪異、体験してみませんか?
投稿者の人気記事





-
busyoucow
さんが
2021/02/28
に
編集
をしました。
(メッセージ: 初版)
-
busyoucow
さんが
2021/02/28
に
編集
をしました。
-
busyoucow
さんが
2021/12/10
に
編集
をしました。
ログインしてコメントを投稿する