

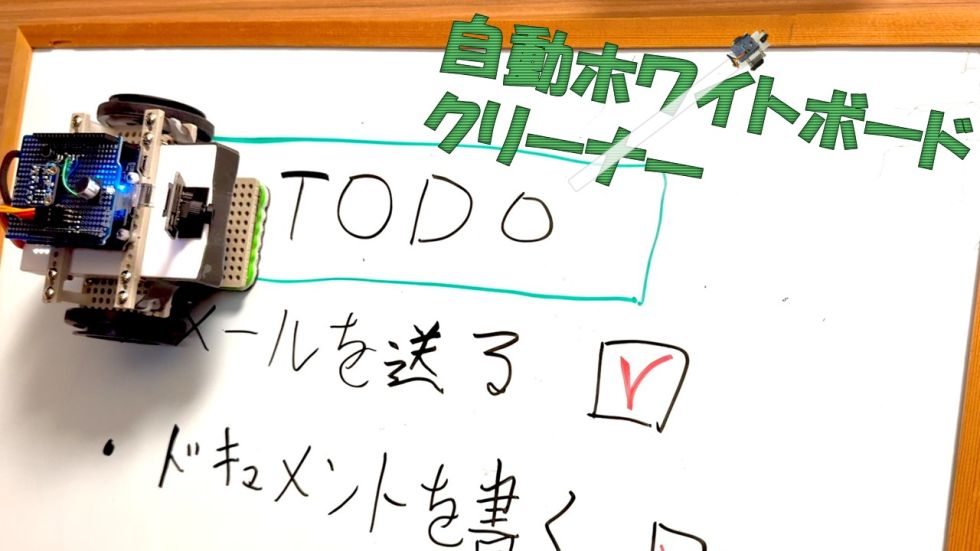
自動ホワイトボードクリーナー
概要
私は、今まで壁を走るロボット「うおーるぼっと」シリーズを開発してきました。
うおーるぼっとは、ホワイトボードに貼り付けてリモコンやスマートフォンで動かしたり、ペンで描いたコースに触れないように動かしたりする楽しむためのロボットです。
うおーるぼっとはホワイトボードを走れるので、折角ならばホワイトボードに書いたものを自動的に消せるようにしたいと思いました。
自動的に消せるホワイトボードはあるものの、専用のものだったり、故障が多かったりと一般的にはなかなか見かけません。
うおーるぼっとであれば、手軽にホワイトボードに貼り付けて使えるので、一般的なホワイトボードでも後づけで利用できます。
今回は、Spresenseを使用し、音声認識や画像認識を使いつつ試作を作ってみました。
構成
構成は以下のとおりです。
センサーとして、Spresense用のHDRカメラボード、コンデンサマイク、三軸の加速度センサーを使用してます。
HDRカメラは、ホワイトボード上に書かれたものやホワイトボードの端を検出するのに使用しています。
コンデンサマイクは、音声のキーワードで動作開始ができるように搭載しました。
三軸の加速度センサーは向いている方向がわかるように搭載しています。垂直に張り付いているので、重力加速度を検出するだけで方向がわかります。
部品
| 品名 | 個数 | 購入先 |
|---|---|---|
| SPRESENSEメインボード | 1 | https://www.switch-science.com/products/3900 (今回はコンテストで提供いただいたものを使用しています) |
| SPRESENSE拡張ボード | 1 | https://www.switch-science.com/products/3901 |
| SPRESENSE HDRカメラボード | 1 | https://www.switch-science.com/products/8080 (今回はコンテストで提供いただいたものを使用しています) |
| コンデンサマイク(高感度用と環境音用) | 2 | 秋月電子通商やAmazonなど |
| 抵抗 2.2KΩ | 1 | 秋月電子通商やAmazonなど |
| Adafruit MMA8451 三軸加速度センサ | 1 | https://www.switch-science.com/products/1868 |
| 360連続回転SPT5525-360 25KGデジタルサーボ | 2 | Amazonなど |
| サーボ用ホイール&タイヤ | 2 | Amazonなど |
| Arduino用バニラシールド基板ver.2 | 1 | https://www.switch-science.com/products/991 |
| Arduinoシールド用ピンソケットのセット | 1 | https://www.switch-science.com/products/995 |
| cheero Energy Plus 5000mAh IoT機器対応 大容量 モバイルバッテリー | 1 | Amazonなど |
| USBケーブル | 1 | Amazonなど |
| タミヤ ユニバーサルプレート | 1 | Amazonなど |
| ホワイトボード消しゴム | 2 | Amazonなど |
| ネオジム磁石(ネジで取り付けられるもの) | 1 | Amazonなど |
機能確認
姿勢制御
垂直に走行する場合、重力加速度を検出すれば、向いてる方向がわかります。
そのため、加速度センサを使って、上方向、右方向、左方向、下方向への正確に進めるようにコントロールします。
加速度センサは、SPRESENSEにI2Cで接続できるMMA8451を使用しました。
拡張ボードを使用したので、電圧は3.3Vベースで信号線とともに接続しています。
次の動画は、姿勢制御の確認です。ホワイトボードを回転させても常に右方向を向き続けます。
画像認識
取り付けられたカメラにより、ホワイトボードの端や書かれたものを認識して制御します。
キーワード音声認識
「開始」と「終了」という音声のキーワードで動作を開始・停止できるようにしました。
キーワードの音声と環境音を検出して、キーワードのパターンを区別しています。
動作
組み合わせた動作の様子です
ソースコード
画像認識と音声認識
メインコアのコード
Main.ino
#if (SUBCORE != 1)
#error "Core selection is wrong!!"
#endif
#include <MP.h>
#include <Servo.h>
#include <Wire.h>
#include <Adafruit_MMA8451.h>
#include <Adafruit_Sensor.h>
// サーボの停止位置の値
// 個体差で中心値を微調整
#define SERVO1_CENTRE_VALUE 93
#define SERVO2_CENTRE_VALUE 90
// サーボの最大スピード
#define SERVO_MAX_SPEED 40
enum Mode {
MODE_STOP,
MODE_RIGHT_RUN,
MODE_LEFT_RUN,
MODE_UP_RUN,
MODE_DOWN_RUN
};
Servo servo1;
Servo servo2;
Adafruit_MMA8451 mma = Adafruit_MMA8451();
Mode currentMode = MODE_STOP;
void setServo(int16_t right,int16_t left) {
int16_t servo1_speed = right;
int16_t servo2_speed = left;
if (servo1_speed > SERVO_MAX_SPEED) servo1_speed = SERVO_MAX_SPEED;
if (servo2_speed > SERVO_MAX_SPEED) servo2_speed = SERVO_MAX_SPEED;
servo1.write(SERVO1_CENTRE_VALUE+servo1_speed);
servo2.write(SERVO2_CENTRE_VALUE-servo2_speed);
}
void setup() {
MP.begin();
Serial.begin(115200);
servo1.attach(6);
servo2.attach(5);
mma.begin();
mma.setRange(MMA8451_RANGE_2_G);
}
void loop() {
int ret;
int *buff;
ret = MP.Recv(&msgid, &buff);
if (ret >= 0) {
currentMode = buff;
}
mma.read();
if (currentMode != MODE_STOP && mma.z > -3000 && mma.z < 3000){
int16_t position = 0;
if (currentMode == MODE_RIGHT_RUN || currentMode == MODE_LEFT_RUN) position = mma.y;
if (currentMode == MODE_UP_RUN || currentMode == MODE_DOWN_RUN) position = mma.x;
int target = 0; // 目標値(Yを0に合わせる)
float Kp = 0.05; // 比例ゲイン(調整可能)
int controlSignal = Kp * (position - target); // 制御信号を計算
// 制御信号をm1とm2に反映
int16_t m1 = constrain(-controlSignal, -SERVO_MAX_SPEED, SERVO_MAX_SPEED); // m1の範囲を制限
if (m1 > 7 || m1 < -7) {
int16_t m2 = -m1; // m2はm1と逆向きに設定
if (currentMode == MODE_RIGHT_RUN || currentMode == MODE_UP_RUN) setServo(m1,m2);
if (currentMode == MODE_LEFT_RUN || currentMode == MODE_DOWN_RUN) setServo(m2,m1);
} else {
setServo(-SERVO_MAX_SPEED,-SERVO_MAX_SPEED);
}
} else {
setServo(0,0);
}
Serial.println();
delay(100);
}足回りの制御
サブコアのコード
Sub.ino
#if (SUBCORE != 1)
#error "Core selection is wrong!!"
#endif
#include <MP.h>
#include <Servo.h>
#include <Wire.h>
#include <Adafruit_MMA8451.h>
#include <Adafruit_Sensor.h>
// サーボの停止位置の値
// 個体差で中心値を微調整
#define SERVO1_CENTRE_VALUE 93
#define SERVO2_CENTRE_VALUE 90
// サーボの最大スピード
#define SERVO_MAX_SPEED 40
enum Mode {
MODE_STOP,
MODE_RIGHT_RUN,
MODE_LEFT_RUN,
MODE_UP_RUN,
MODE_DOWN_RUN
};
Servo servo1;
Servo servo2;
Adafruit_MMA8451 mma = Adafruit_MMA8451();
Mode currentMode = MODE_STOP;
void setServo(int16_t right,int16_t left) {
int16_t servo1_speed = right;
int16_t servo2_speed = left;
if (servo1_speed > SERVO_MAX_SPEED) servo1_speed = SERVO_MAX_SPEED;
if (servo2_speed > SERVO_MAX_SPEED) servo2_speed = SERVO_MAX_SPEED;
servo1.write(SERVO1_CENTRE_VALUE+servo1_speed);
servo2.write(SERVO2_CENTRE_VALUE-servo2_speed);
}
void setup() {
MP.begin();
Serial.begin(115200);
servo1.attach(6);
servo2.attach(5);
mma.begin();
mma.setRange(MMA8451_RANGE_2_G);
}
void loop() {
int ret;
int *buff;
ret = MP.Recv(&msgid, &buff);
if (ret >= 0) {
currentMode = buff;
}
mma.read();
if (currentMode != MODE_STOP && mma.z > -3000 && mma.z < 3000){
int16_t position = 0;
if (currentMode == MODE_RIGHT_RUN || currentMode == MODE_LEFT_RUN) position = mma.y;
if (currentMode == MODE_UP_RUN || currentMode == MODE_DOWN_RUN) position = mma.x;
int target = 0; // 目標値(Yを0に合わせる)
float Kp = 0.05; // 比例ゲイン(調整可能)
int controlSignal = Kp * (position - target); // 制御信号を計算
// 制御信号をm1とm2に反映
int16_t m1 = constrain(-controlSignal, -SERVO_MAX_SPEED, SERVO_MAX_SPEED); // m1の範囲を制限
if (m1 > 7 || m1 < -7) {
int16_t m2 = -m1; // m2はm1と逆向きに設定
if (currentMode == MODE_RIGHT_RUN || currentMode == MODE_UP_RUN) setServo(m1,m2);
if (currentMode == MODE_LEFT_RUN || currentMode == MODE_DOWN_RUN) setServo(m2,m1);
} else {
setServo(-SERVO_MAX_SPEED,-SERVO_MAX_SPEED);
}
} else {
setServo(0,0);
}
Serial.println();
delay(100);
}最後に
電源にモバイルバッテリーを利用したため、重量が重く、自重による負荷でなかなか水平に直進できませんでした。
そのため、姿勢制御が過剰に働いてしまうことが多かったので、バッテリーを見直した方が良いかもしれません。
あと、サーボモーターも必要以上にパワーがあるものだったので、これも変更すれば軽量化できそうです。
画像認識も誤認が多いので、もうちょっと作りこんでいきたいと思っています。
投稿者の人気記事


-
jksoft
さんが
2025/01/31
に
編集
をしました。
(メッセージ: 初版)
ログインしてコメントを投稿する