 セットアップや使用方法
セットアップや使用方法  Lチカ
Lチカ  1598
1598ESP-01 CPUのポート出力で直接ステッピングモータを ESP-NOW双方向通信で駆動制御
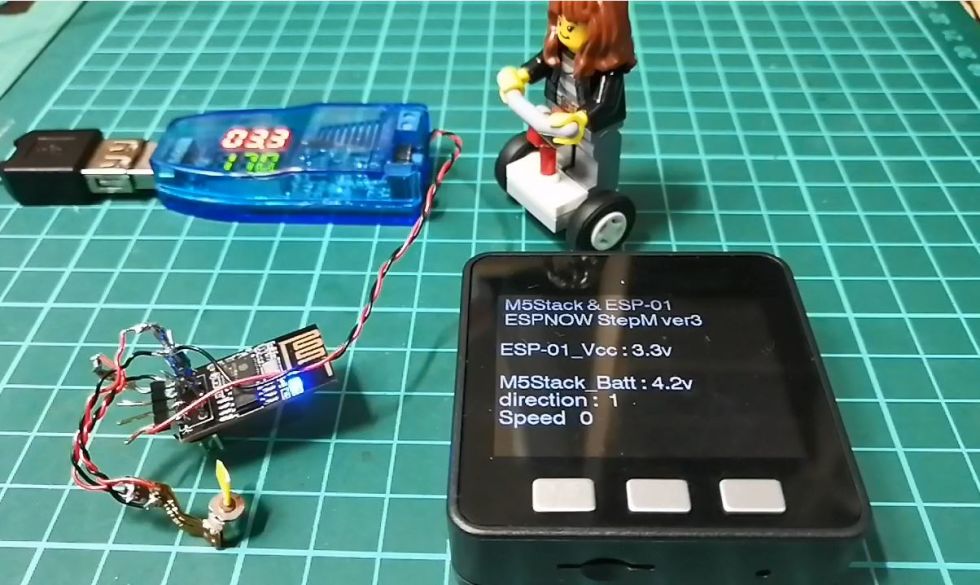
LEGO ミニフィグ世界サイズのセグウェイ(倒立振子ロボ)を作ろうとしてます。
でもって小さなマイコン、小さなモータ各種検討中です。
これまでM5StickC使った倒立振子ロボはいろいろ作ったけどそれより
ずっと小さいものに挑戦中。
後々、スマホでラジコンにすることなど考えて無線マイコンモジュールはESP-01Sです。
モータの出力は小さいのでモータドライバは使わず、
ESP8266、マイコンのポート出力で直接ステッピングモータを動かしてみました。
Arduinoにはステッピングモータのライブラリがありますが、
細かくPWMで出力電流の調整やマイクロステップの自由が利かないので使わず
自作の制御です。
写真のような小さなステッピングモータなら他のマイコンでも同様なことはできると
思います。
但し、出力は小さいので用途はかなり限られます。
解説などはこの辺りご参考です。
https://n-shinichi.hatenablog.com/entry/2022/12/29/124240?_ga=2.90058843.1374005677.1672060406-124876159.1618931563
動画はこの辺り
https://twitter.com/shinichi_nin/status/1609091147661729792
工作ごとの趣味を紹介してます
現在仕事は次世代パワーエレクトロニクス研究です。
昔はHV車、、量産車からルマンHVレーシングカーなどの
インバータ、モータの設計、開発。
名古屋大学非常勤講師(モータ、インバータ制御技術)
小学5年生理科講師(電磁石、モータ単元)
ブログで詳しい説明をしてるもの多いです。
https://n-shinichi.hatenablog.com/
投稿者の人気記事






-
n-shinichi
さんが
2022/12/31
に
編集
をしました。
(メッセージ: 初版)
ログインしてコメントを投稿する